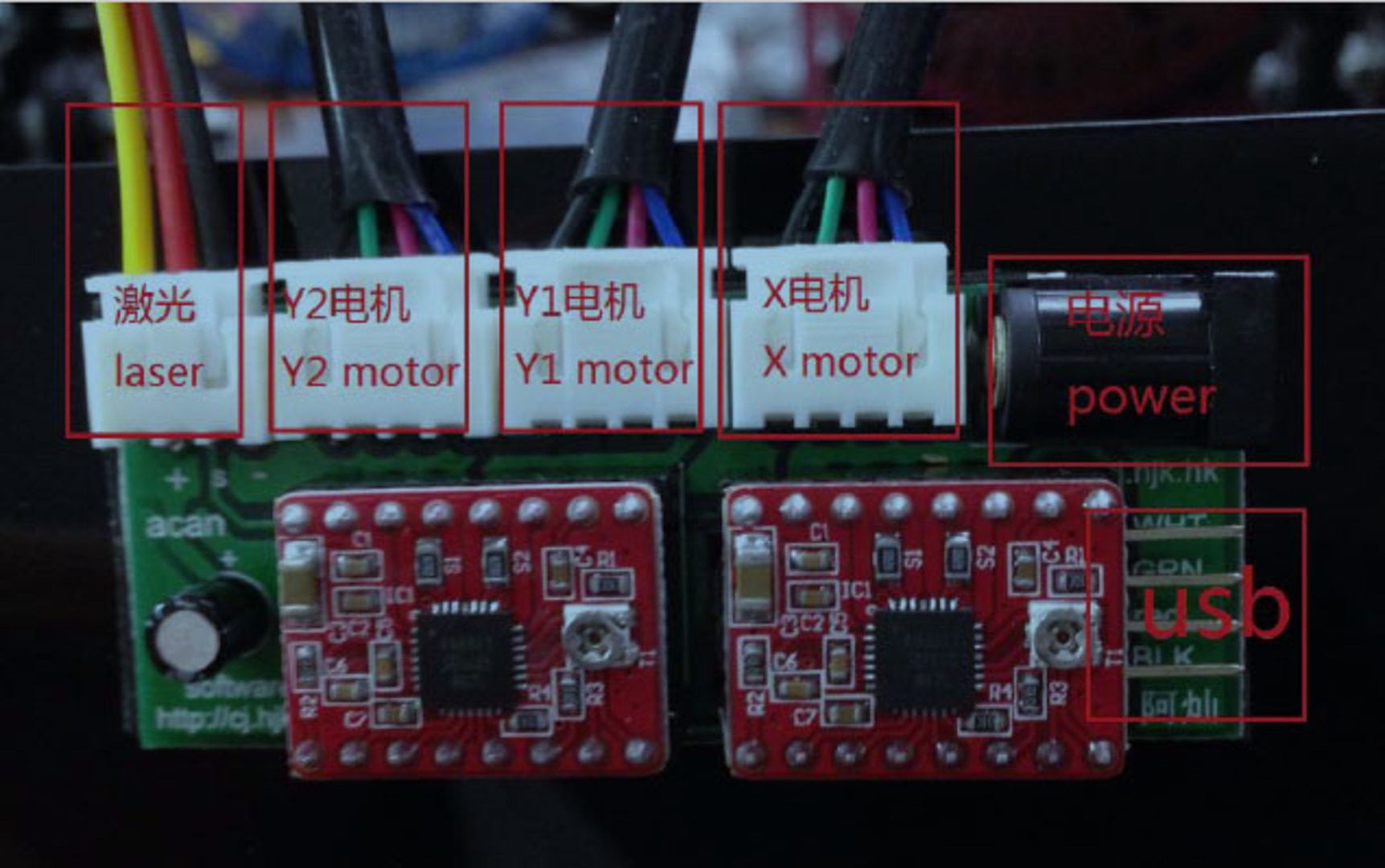
Azért kellene váltanom, mert kellene a főorsó engedélyezés és a fordulatszám szabályozás is, az UNO-n vagy az egyik vagy a másik van csak. Azért nem értem a dolgot, mert ahogy elnéztem a képeket, nekem úgy tűnik, hogy nem véletlen ugyanaz a lábkiosztás a panelokon. Lásd a képeket.
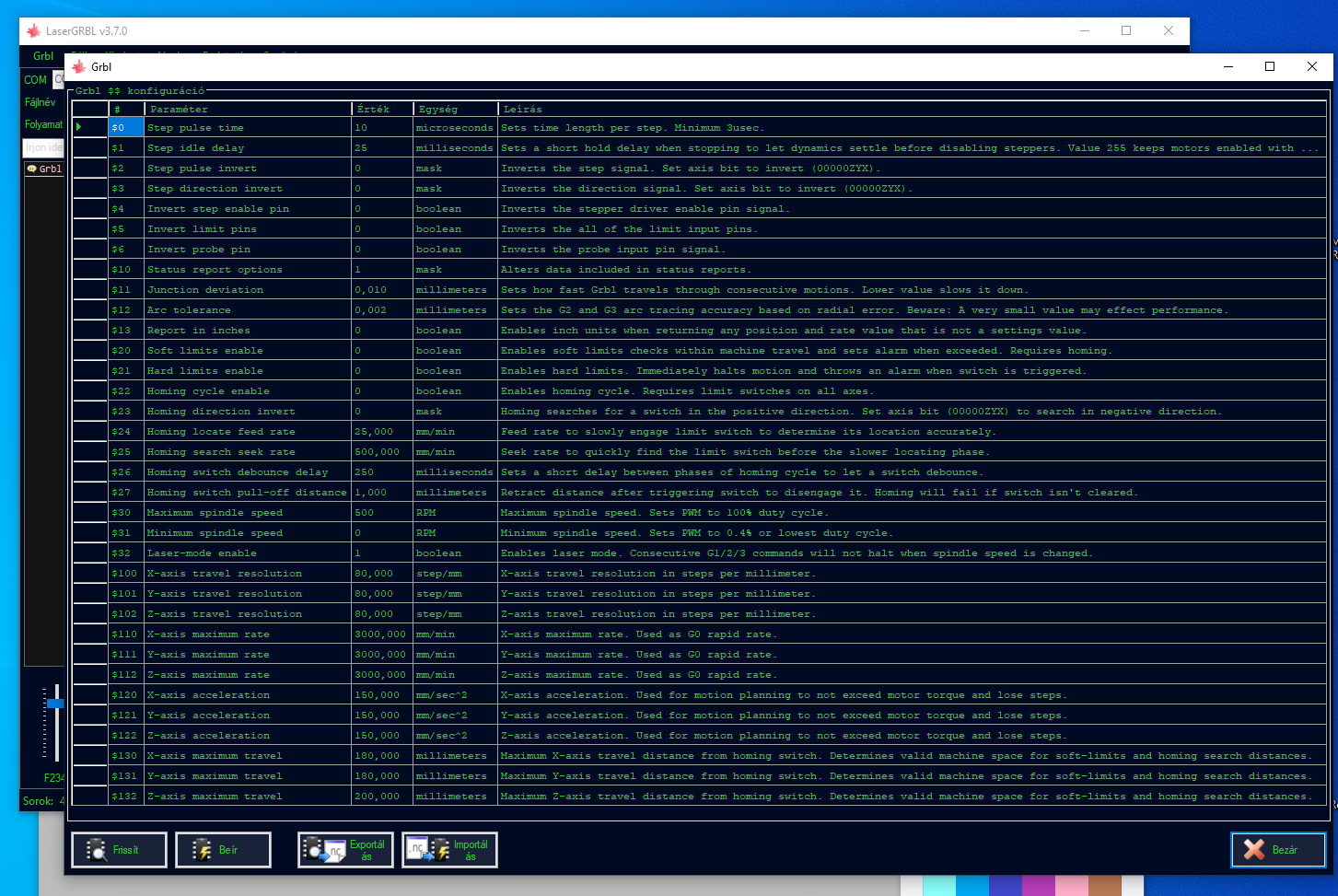
Azért ennél kicsit árnyaltabb a dolog. Gyorsan utánaolvastam, már csak kíváncsiságból is. A GRBL az eredeti shield-del nem fog menni Megán, mert a step jeleknek egy porton kell lenniük. Ez az UNO-ban teljesül, de a Mega máshogy van kivezetve a csatlakozókra. (Forrás)
A lényeg: „For simple Arduino code, you would use the digitalWrite function. But this doesn't simply set the output to the desired state. Instead it looks up the pin, checks if it is capable of PWM or a timer, disables that if necessary, and then uses the port and a mask to set the output high or low. Each of these operations take time and thus slow the program down. It also means each pin needs to be done separately, so if you are having it step in x and y, it will need to step x, and then y, or y then x. GBRL does it much faster and together, but requires the step pins to be on the same port. First it calculates the mask, and then it applies it to the port, changing all the step outputs at once. The issue is how the ports are mapped on the different arduinos. The ports are how the microcontroller handles the inputs and outputs, and don't necessarily map nicely to the pins on the arduino board. For the step pins for the CNC sheild, they are digital pins 2, 3 and 4. For the UNO, that corresponds to pins 2, 3 and 4 of port D. So that works fine. (Port D is digital 0-7, port B is 8-13, port C is analogue 0-5). For the Mega, it is a different story. Digital pin 2 and 3 correspond to pin 4 and 5 of port E and then pin 4 if pin 5 of port G. Assuming you haven't changed any of the code, it is still sending the step pins to the pins on port D. This means for the MEGA they are going to pins 19, 20 and the abyss (i.e. not connected). As such, the steppers aren't recieving the step signals. The same issue applies for the end-stops and the dir pins.”
Már csak kíváncsiságból kérdezem: miért kellett átállni Megára? Mit nem tudott az Uno?
Mivel a MEGA az UNO kibővített változatának is tekinthető (értsd: azok a lában amik megvannak az UNO-n azok pont ugyanott vannak a MEGA-n is) ezért a lábak funkciója nem változna az eretihez képest, csak a plusz funkciókat amiket az UNO nem tud, kellene másik lábra áttenni. A hangsúly igazából a HOGYAN?-on van.
Bizonyos korlátok betartásával át lehet írni másra, de: van analóg és digitális láb, ezek nem felcserélhetők bizonyos esetekben. Ha soros port van használva, akkor a 0 és 1 láb (rx/tx) is kötött. A PWM jelet is csak az alaplapon "~" jellel megjelölt digit. lábak tudják. ...és talán a megszakítások kezelése is lábhoz kötött, de ebben nem vagyok biztos.
Sziasztok. Frekiváltó vezérlés miatt áttérnék UNO-ról MEGA-ra. A rávaló GRBL verziót megtaláltam. A gondom az, hogy teljesen más lábkiosztást használ mint az UNO. Van rá lehetőség, hogy a lábakat átdefiniáljam? Nincsenek nagy programozási ismereteim, de alap dolgokkal azért elboldogulok.
B.Zoltán | 1722
2020-10-18 16:00:40
[1709]
Gondolom, hogy mindannyiunk nevében mondhatom, örülünk, hogy összejött minden. Példaértékű a hozzáállásod a dolgokhoz, és köszönjük a visszajelzésedet. Vannak akik megfeledkeznek erről.
Amikor elkezdtem olvasni a topikot, rögtön a mélyvízben találtam magam, és a rengeteg információt nem tudtam hová tenni a kis agyamban, mert nem volt számukra kialakított hely. Szerintem sokan vagyunk így, és sokan belefáradnak a reménytelenül érthetetlen hozzászólásokba.
Nos ezek az információk hiányoztak a leginkább a kezdéshez, amikor elromlott a lézerem. Szerencse, hogy elromlott, mert így bele kényszerültem a kezdeti tudás megszerzésébe.
Talán érdemes átalakítani, írni hozzá, amíg nem lépi át a kezdőknek szánt bonyolultságot. A félreértés elkerülése érdekében megjegyzem, hogy tudom, hogy a bonyolultabb dolgokról találunk sok információt, csak pont a "vonat eleje" hiányzik.
Az Arduino egy olyan elektronikai eszköz, ami a rá telepített program segítségével képes vezérelni egyszerű vagy összetett elektromos vagy elektromechanikai eszközöket, gépeket. A rá telepíthető programot a hozzáértők maguk is megírhatják C/C++ programnyelven, azonban több felhasználói program segít feltelepíteni a számára szükséges -mondjuk így- segédprogramot. Ez a segédprogram a firmware, ami minden felhasználói programnak a sajátja, más programmal nem működik. A felhasználói programok pl.: Benbox, LaserGRBL, GrblGru stb. telepítése után telepíteni kell az eszköz chipjének meghajtó programját (driver) a számítógépre, és az Arduino eszközre a program által felkínált vagy az azzal kompatibilis, az interneten megtalálható segédprogramot (firmware).
Az Arduino hardvernek több tipusa van, pl.: - Arduino/S - Diecimila/Duemilanove - Mega2560 - UNO - Due - UNO R3 - Leonardo - Mini - NANO Mindegyik a többitől eltérő teljesítményű, méretű, bonyolultságú és láb kiosztású. Foglalatként használhatunk fejlesztői környezetet, ahol szabadon használhatók a ki- és bemeneti portok, vagy készen kapható úgynevezett pajzsot, amit általában konkrétabb funkciókra készítenek. Ezek némelyikével komplett cnc vezérlést kapunk motorvezérlőkkel, érzékelő és kapcsoló portokkal, lézer fej vagy maró motor vezérléssel.
Bocs | 284
2020-10-18 12:55:49
[1706]
Üdözlöm a Kedves Fórumozókat!
Szeretném a köszönetemet kifejezni a sok segítség miatt. Különösen TBS-TEAM-nek és B.ZOLTÁN-nak, akik privátban is sokat segítettek, és érdekes módon a segítségük pont kiegészítette egymást. Természetesen a többiek hozzászólása is előre mozdította a megoldást, mert a vitáknak is lehet és lett pozitív eredménye, ezért Nekik is köszönettel tartozok.
A lézer gép remekül működik, felülmúlja minden elvárásomat. Nemsoká leírok pár tapasztalatot, hátha a jövőben valaki hasznát veszi. A tudás birtokában lévőknek lehet, hogy komolytalannak vagy okoskodásnak fog tűnni, de ugye nekem is hiányoztak ezek az információk.
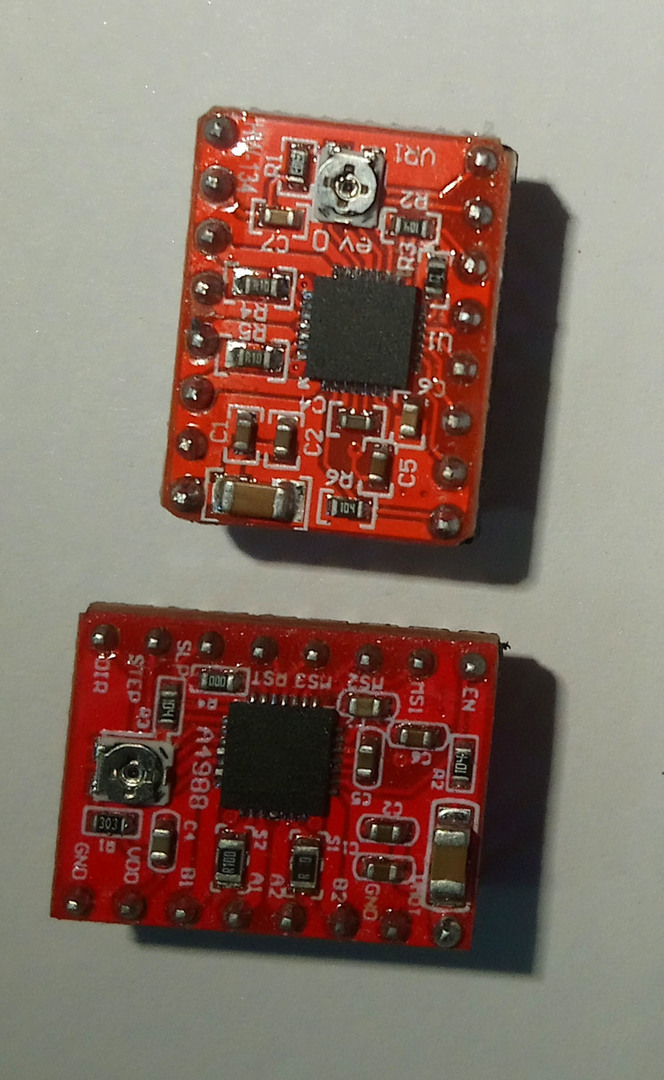
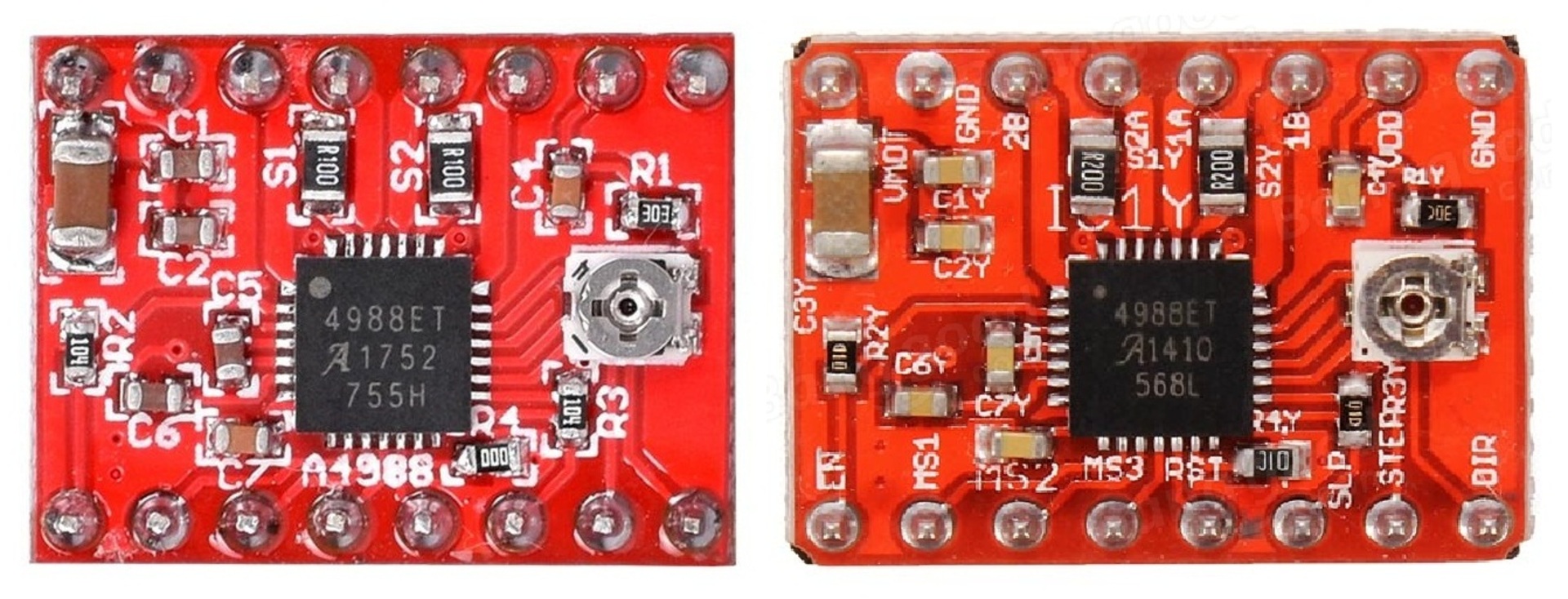
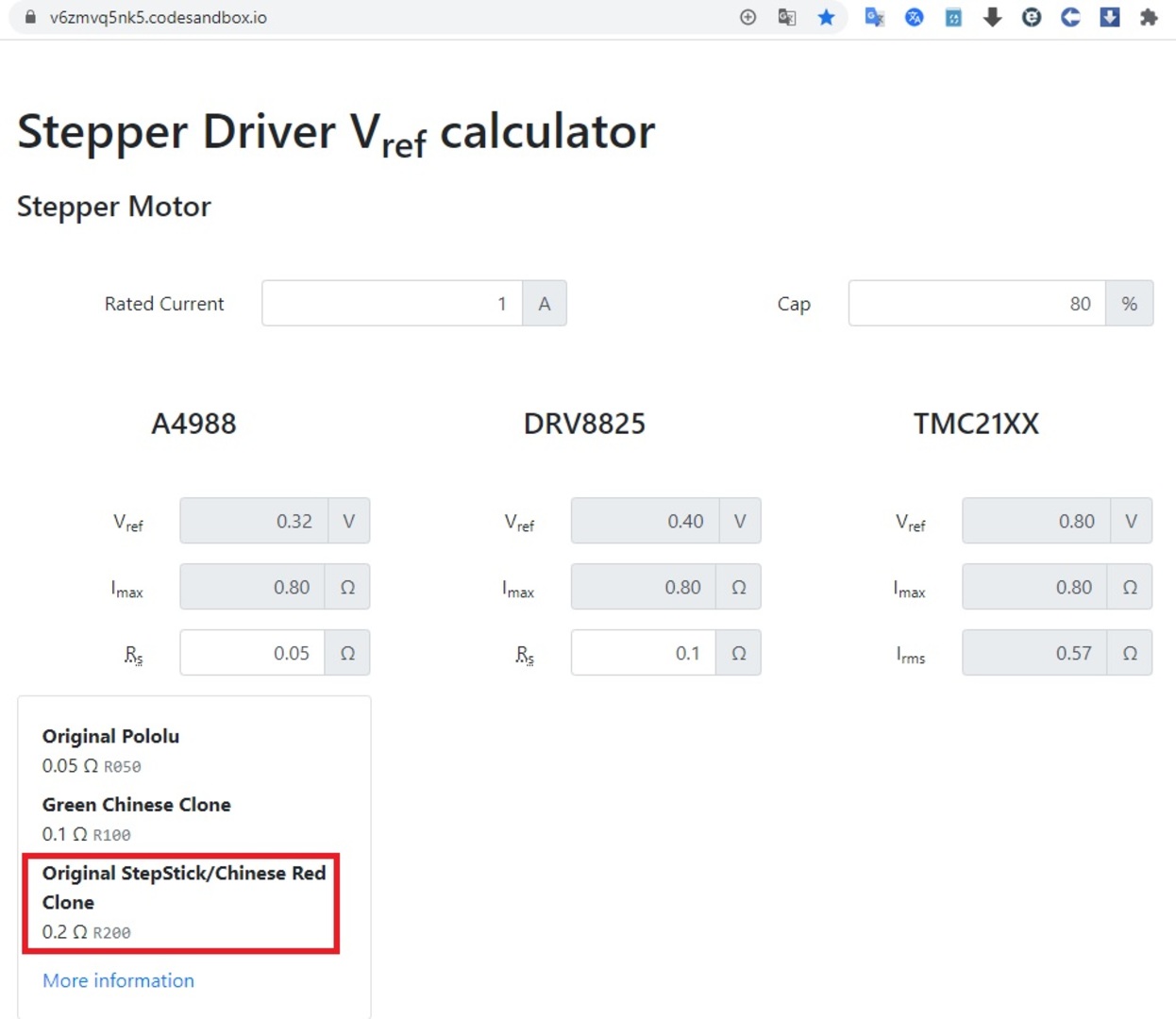
„Azért van rajta R200, mert azon annak kell lenni, ott van a leírásban is, hogy melyik színű driveren milyen ellenállás érték van.”
Még ez sem igaz, mert piros panelek között is van, amin R100 van.
Én maradok továbbra is az IC gyári adatlapjánál, ott egyértelműen be kell írni az ellenállás értéket, és nem szín vagy gyártó alapján megy. De részemről mindenki úgy csinálja, ahogy akarja.
(Elég érdekes, hogy nem vette észre az illető, hogy az áramerősség mértékegysége nem Ohm, még azt sem, hogy kétszer szerepel az Ohm egymás alatt...)
A DRV8825 vezérlőnél (az adatlapja alapján) ezzel a képlettel kell kiszámolni: Imotor = Uref / (5*Rsensor)
Ez a képlet csak abban az esetben jó, ha az S1 S2 szenzor ellenállások (ami az A4988 IC fölött van) értéke 0.05 Ohm (R050). Amit beillesztettem képet 'Arduino' téma, 1677. hozzászólás azon már R200 van, itthon az én vezérlőmön R100 van, tehát a fenti képlet ezekben az esetekben hibás eredményt ad!
A helyes képlet pedig ez, ami a gyári A4988 adatlapon szerepel:
Imotor = Upoti / (8*Rs)
Ha R100, akkor: Imotor = Upoti / (8*0.1)
Ezt lehet egyszerűsíteni úgy, hogy Imotor = Upoti * 1.25 És ha változik az S1 S2 ellenállás (mert hogy a kínaiaknak éppen elfogyott, és most más érték van raktáron ) akkor írhatnánk mindig egy új képletet rá. Ezért azt a képletet kell használni, ami az adatlapon van, és nem lehet mellényúlni.
Ezért gondoltam azt, hogy ha középállásba teszi valaki a potmétert, ott (a méréseim alapján) 0.7A körüli áram adódik a motornak, ehhez képest, ha szükséges, lehet rátekerni vagy levenni belőle. Ez igaz lehet, akármilyen értékű szenzorellenállás van a panelon.
Ha valaki műszerrel be tudja állítani az áramot, nyilván az a legjobb megoldás. Ez a videó is sok segítséget nyújt benne, és a fenti képlet hibáját is értelmesen elmagyarázza, és megmutatja a helyes képletet.
A fordítást érdemes bekapcsolni, elég jól fordít.
Bocs | 284
2020-10-16 22:31:51
[1699]
Neked is köszönöm az ismételt segítséget. Már elkezdtem kicsomagolni az ajándékokat. Sajnos hátfájós munkám lesz, de utána belevetem magam.
A lézert szerintem egyelőre hagyjuk figyelmen kívül A Z-t is, mert az későbbi történet lesz, egyelőre funkciótlan. Tehát csak 2 tengelyről van szó, ami döcögve, rángatózva megy. Azt lenne jó tudni, hogy a motor vezérlő okozhat-e problémát az Ardunioban. Az újabb cucchoz vettem hűtőbordát, de a motorvezérlő leírása szerint nem kell, mert a motorok 0,5 A-esek, a vezérlő meg 2 A-es. Emellett nem is tilos feltenni, csak arra gondoltam, hogy a beállításig tapintással ellenőrizném a melegedést. Persze óvatos be/ki kapcsolásokkal.
Ha nem lesz pontos info a motor áramról vagy valami mérhető értékről, akkor marad a kísérletezés, próbálgatva hangolás. Csak vajon a határértékre állított poti mellett károsodhat-e valami?
Ha egy vezérlő hajtsa meg a két motort, akkor lehet hogy növelni kell. Bár a Z mozgás nem szokott gyors lenni, így nem biztos hogy tévesztene, hozzá teszem nem ismerem a gépedet, és vannak akik sokkal jobban ismerik a lézer dolgokat itt nálam.
Én a közép beállítást azért javasoltam, mert ott még nagy valószínűséggel nem történik nagy baj. Utána csökkentheted növelheted a motoráramokat szükség szerint.
Viszont nem értem, hogy hűtőbordákat nem adtak a vezérlőkkel? Már középállásban is illik rátenni azokat. Nekem GRBL panelen a vezérlőkön egy hosszú közös borda van, és még egy kis venti is mozgatja a levegőt.
Ez ugye egy opto csatoló? Tetszik a gondolat. A tápot az ilyen gépekhez adják gyárilag. Olyasmi, mint a nyomtatók tápja. 12V Dc, max 4A. Az alaplapon van hozzá egy kapcsoló. A régin és az újon is.
valami nagyon kacifántos abban az áramkörben, pl honnan kapja a tápot? ha nem a pc től, már mint a motormeghajtók, akkor illene leválasztani az usb-t, mert egy földhurok kb mindent tönkre tehet, a pc-t is...
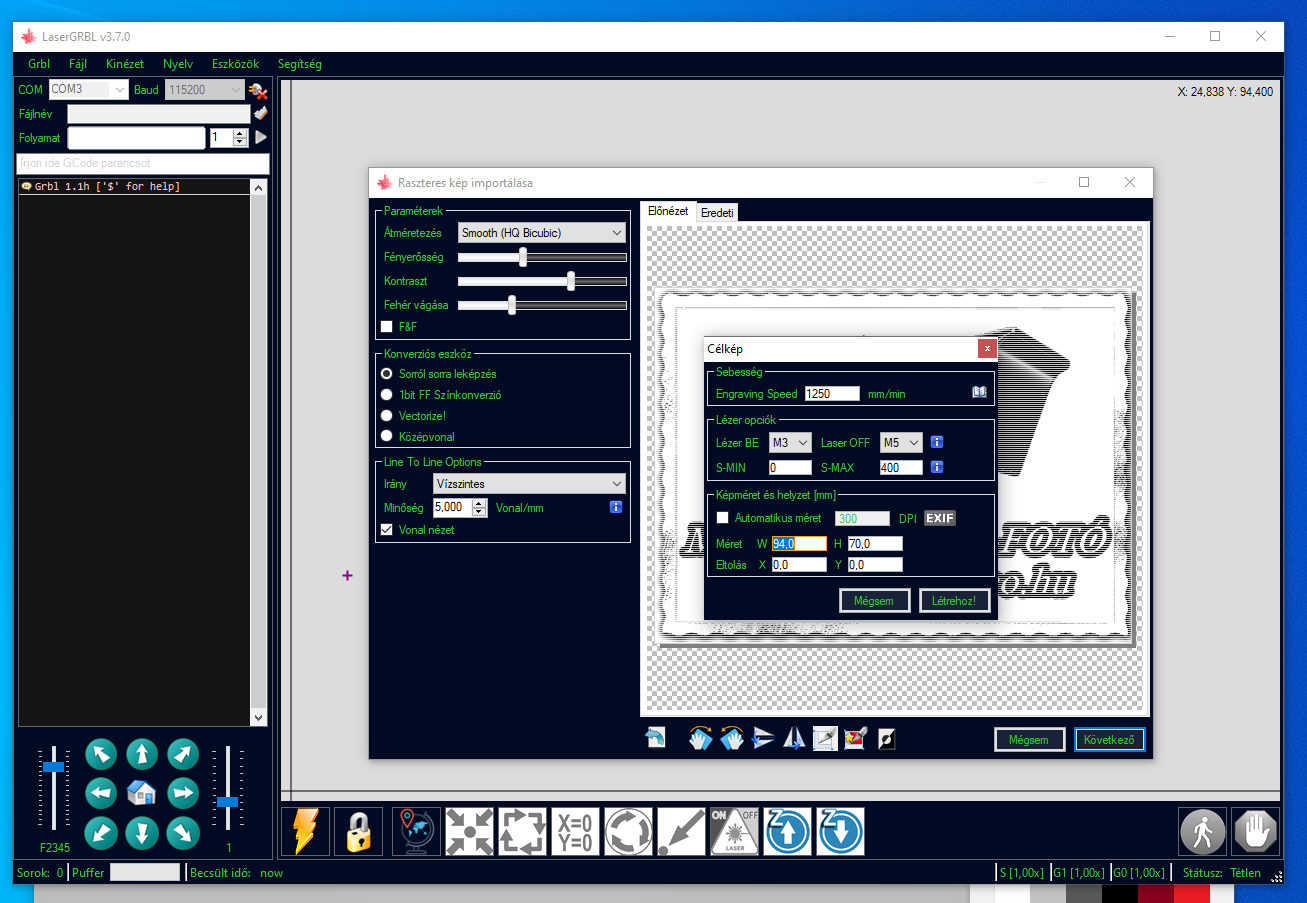
Az új gépnél a beállításon és néhány próbán kívül 2 db utca-házszámot vágtam ki fotókartonból festő sablonnak. Ez vektoros volt, simán megcsinálta. Bocs, az emlékeimben kotorászok. A megnagyobbított vázzal próbálgattam, és elkezdtem gravírozni egy raszteres (jpg) képet, aminek az első soránál csinált egy olyat, hogy az Y tengely mozgását átvette az X. Egyszerre próbálta végrehajtani az x és az y mozgását az x motor. Ezt kör mozgással kipróbáltam, és egyértelműen látszódott.
Ez után jött a potik állítgatása, tehát akkor már vérzett a torka.
A motoroknál persze tartó feszültséget mértem, mert másnak nem lett volna értelme, hiszen mozgás közben változik. De nem tudom, hogy egyáltalán ennek van-e értelme, illetve a 2 motort hajtó vezérlőnél az azonos feszültség nem eredményez-e nagyobb áramerősséget?
A motorvezérlő forrósodását úgy vettem észre, hogy az egyenetlen mozgás miatt megnéztem a motorok tartó áramát, és nagy különbséget tapasztaltam, ezért megérintettem a chipek tetejét, hogy nem túl melegek-e.
Annyira pici volt a váz, hogy nem fért alá semmilyen tárgy, illetve a lézer 16mm-es fókusztávolságával nem tudtam megközelíteni a gép számára túl nagy tárgyaimat. Továbbá kezdettől fogva kissé döcögősen mozogtak a motorok, bár vektoros grafikánál ez nem tűnt fel. Készítettem új vázat, megtoldottam a kábeleket gyakori ellenőrzéssel. Az új vázzal próbálgattam, mikor észrevettem, hogy forrósodik az Y motorvezérlő. Megmértem a motorok tekercseire jutó feszültséget, és mivel az X vezérlő rendben volt, a potival az Y feszültségét is igyekeztem erre hangolni. A forrósodás megszünt, de a "dadogó" mozgás nem, ezért tanácsra közép állásba fordítottam a potit. Ez után füstölt el az Arduino.
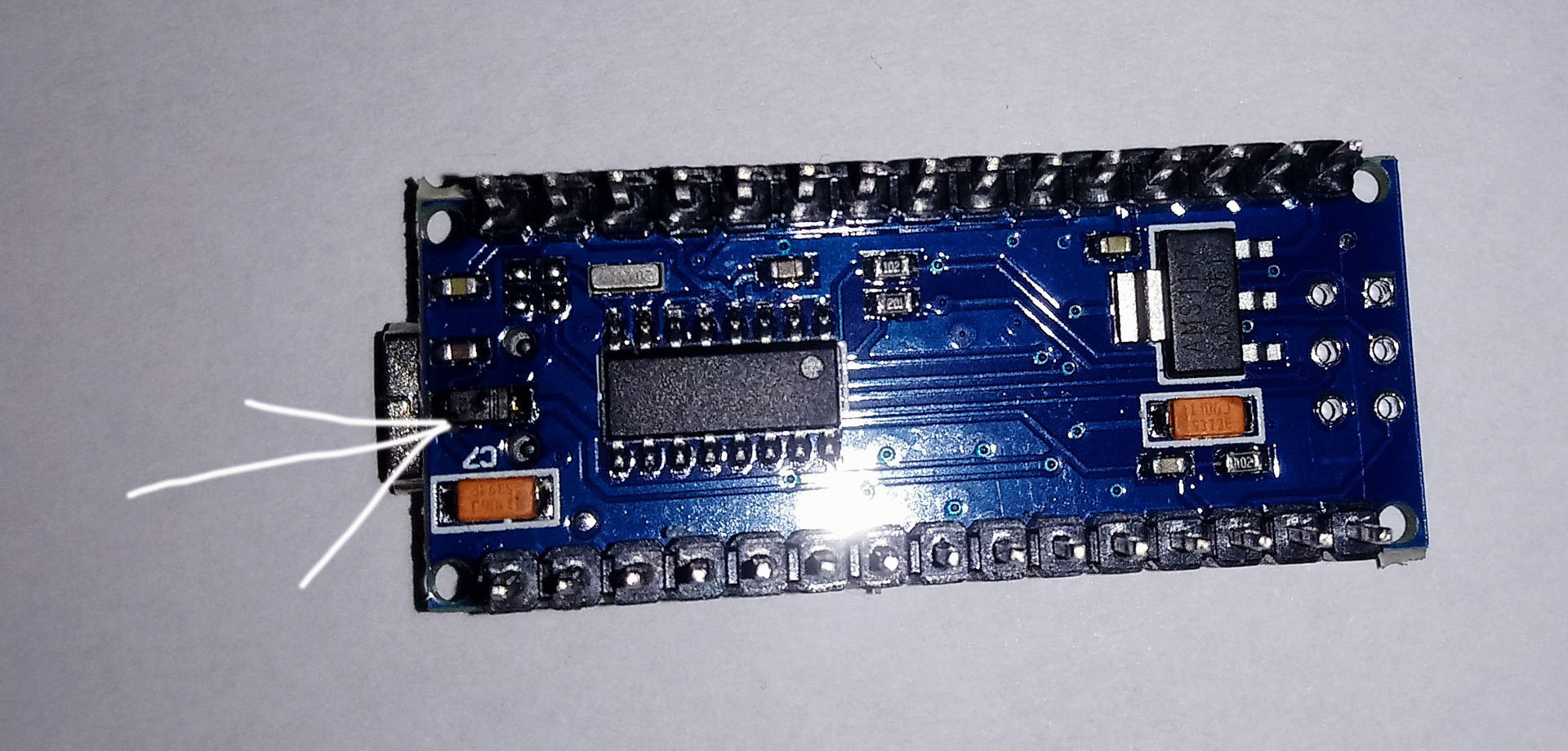
Úgy látom, hogy az Arduino USB csatlakozója alatt lévő -talán Fet- ment tönkre. A hibáson van egy kis dudor, gondolom a forró belső nyomás okozta, az új természetesen teljesen sima.
Tudja valaki, hogy ezt mi okozhatta? A régi cuccban ugye pont középre állítottam a potikat, és utána füstölt el. Persze az előtte lévő hibás beállításnak is lehet ez a késleltetett következménye.
PSoft | 18696
2020-10-16 17:34:38
[1681]
„Vettem egy új "készlet" Arduinos motor vezérlőt.” Ebből feltételezem, hogy előtte már volt egy "régi" is ami valamilyen szinten működött. Annak mi volt, vagy mi lett a baja...lehet róla tudni valamit ami talán most, az újnál segítség lehetne?
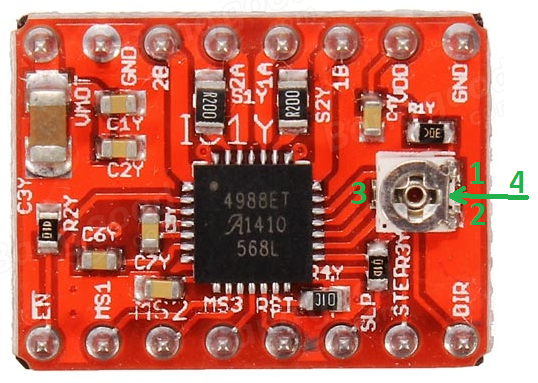
Először is ellenőrizd ezeket a pici potmétereket, hogy középállásban legyenek, akkor nem lehet semmi probléma. Kis segítség hozzá, ha esetleg nem teljesen világos, hogy hogyan kell. A csatolt képen középre van állítva a potméter. A potméter beforrasztását ellenőrizni kell, hogy esetleg azóta nem változtattak-e a panelon. Ez az 1-2-3-as ponton van beforrasztva. Ahhoz képest kell az egyenes szakasznak (4-es) az 1-2-es ponttal párhozamosan állnia. Akkor szemben a kis csuszka középen ér hozzá a potméter ellenállás rétegéhez, ha alánézel, ezt ellenőrizheted is.
Ha ezt így beállítod, biztos hogy emiatt nem fog füst felszállni, de más okból még mindig lehet.
Vettem egy új "készlet" Arduinos motor vezérlőt. https://www.elektrobot.hu/termek.php?filename=4792.html&i=4792 Össze dugdostam a kábeleket, újra telepítettem a Benboxban a driver-t, majd elkezdtem próbálgatni. Mivel a lézer fejjel nem volt gond, most azt nem dolgoztatom, csak a motorokat szeretném beállítani. Ezek működése nem tér el az előző konfigurációtól. Nem simán futnak a motorok, hanem rángatózva, döcögve. Egy orosz weboldalon azt olvastam, hogy ez szoftveres probléma, de az automatikus fordítás és a tudás hiánya miatt nem tudom, hogy mit és hol tudnék még állítani. A motorvezérlők ellenállásához nem nyúltam. A próbán kívül nem járattam, mert lézer nélkül nem kéne füstöt látni.
Arra gondolok, hogy először az ellenállásokkal kellene boldogulnom, hogy ne legyen túlhúzva, aztán a szoftveres beállítással.
Kaptam olyan segítséget is, hogy az egész Arduinos cuccot felejtsem el, és közvetlenül egy soros porton keresztül vezéreljem a gépet. Kicsit bele kóstoltam, de annyi tanulni való szükséges hozzá, hogy még ha csábító is, jelenleg nincs lehetőségem ennyi időt erre szánni. Ezért a jelenlegi projekthez szeretnék segítséget kérni.
Bocs | 284
2020-09-26 12:36:45
[1674]
Vissza állítottam a potit az eredeti állapotba a korábbi fényképek alapján. Az X motor a korábbi forrósodást csinálta, majd egy perc után elkezdett az alaplapi és az Arduino ledje veszettül villogni. Miközben a kapcsolóhoz nyúltam, hogy lekapcsoljam a tápot, az Arduino alól erős füst kezdett gomolyogni.
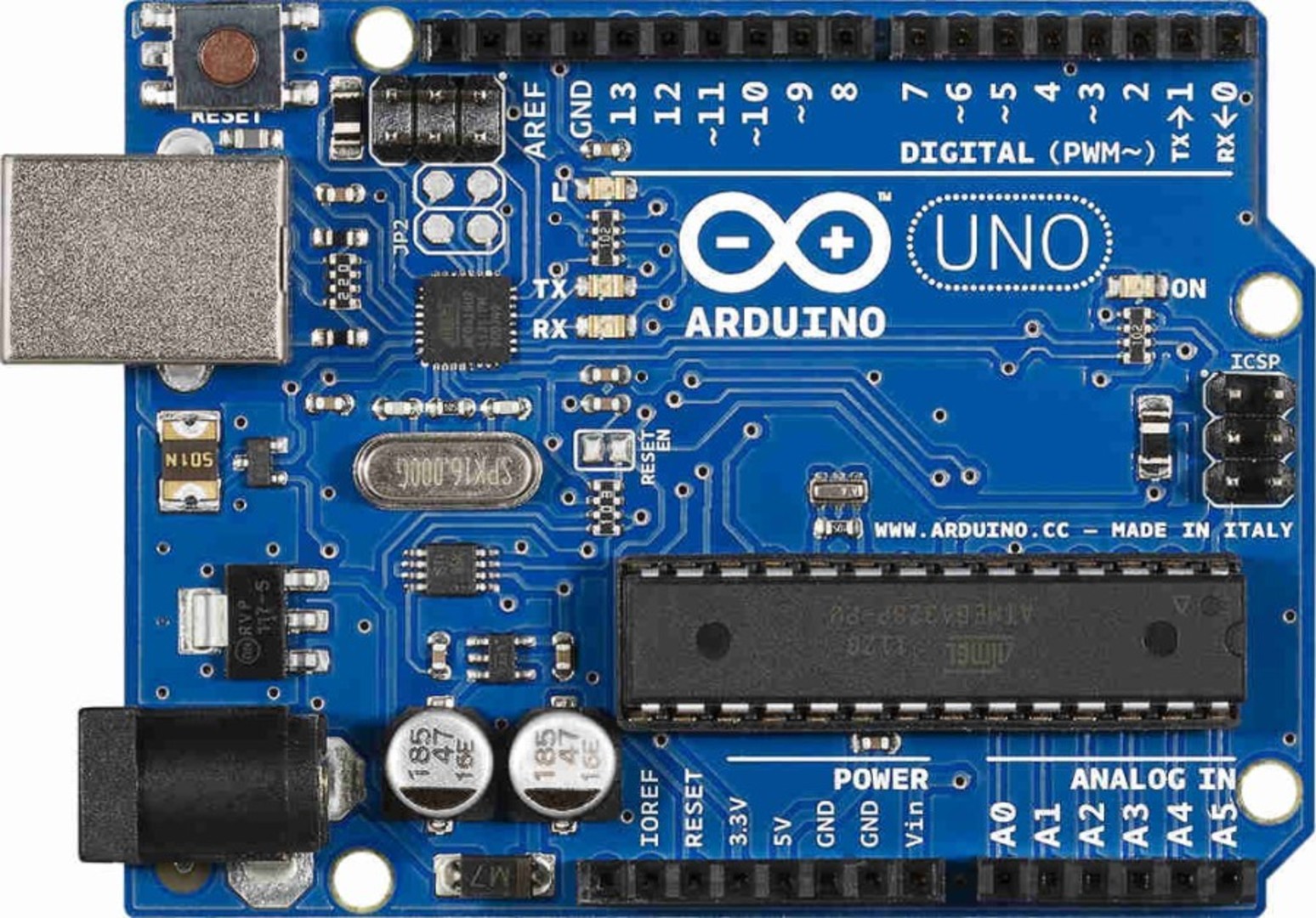
Eljött az ideje a fejlesztésnek. Lehet, hogy más alapra kell helyezni az egészet? Az alábbi kép szerint az Arduino akár felesleges is lehet? Milyen összefüggés van az Arduino és a LaserGrbl program közt? (vagy GrblGru marásnál, esztergálásnál) Egyáltalán mi az a GRBL?
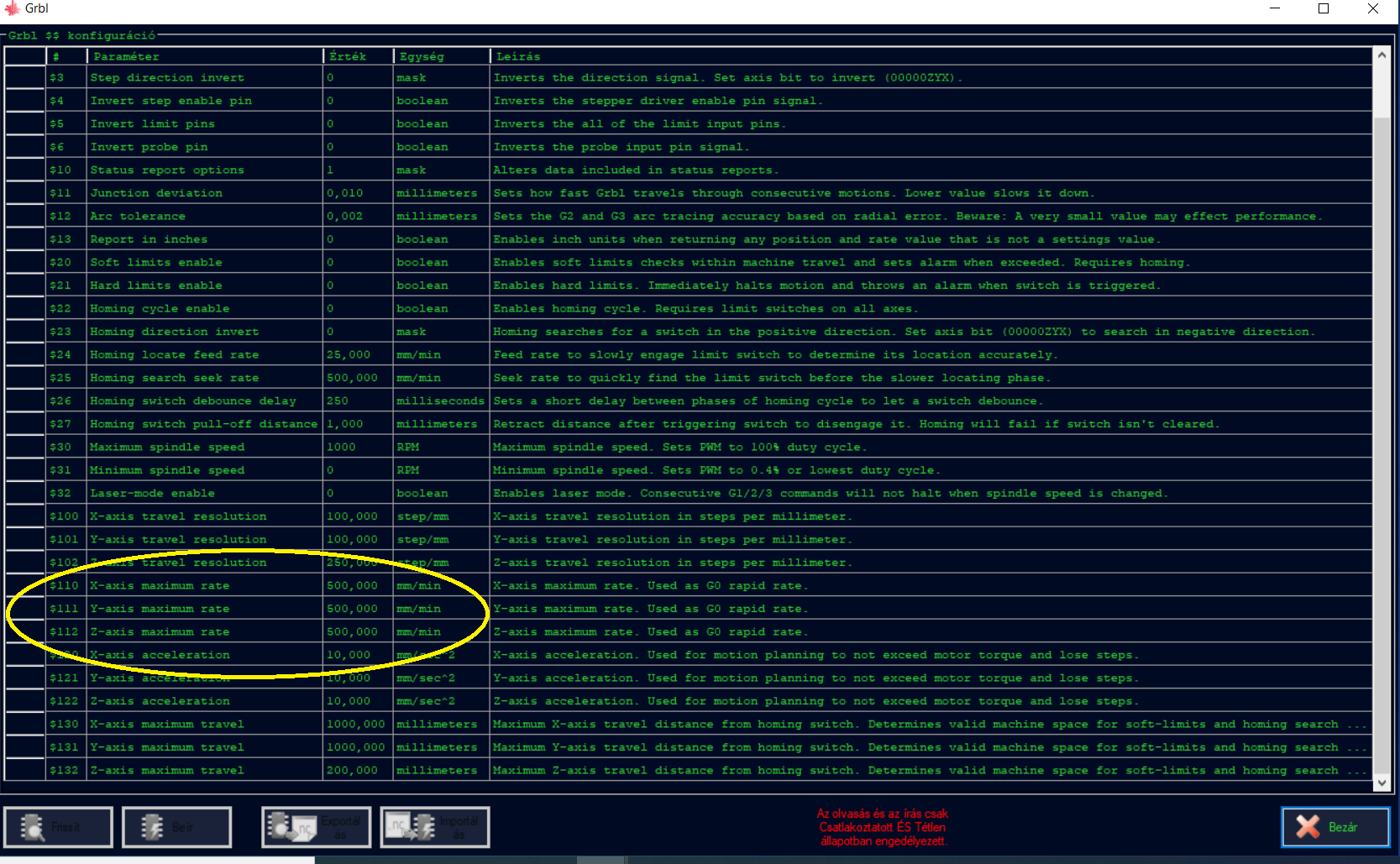
Lehet hogy, az alap beállításban, vagy a Gcodban nincs nagyobb sebességre állítva. Nekem is a maróba tetű lassúra volt állítva a gyorsjárat is. Ha nem "Berreg-recseg" a léptetőmotor, akkor tudna gyorsabban menni.
Amikor téveszt, akkor kell kisebbre venni, én a felére veszem a biztonság miatt, vagy csak kellemes gyorsra.
Igen, lehet, hogy az öszehasonlítás hibás. Viszont nem a munka közbeni sebességgel van gondom, hanem adott esetben mondjuk egy 100x100 mm-es tájkép gravírozásánál ami ugye pixelgrafikus és minden sort balról jobbra éget, jó lenne, ha a gyorsjárat a sor elejére valóban gyors lenne. A lézer egyébként elvileg 15/7W. Lehet, hogy ez nem valós, de az egész fej vagy 4x akkora, mint a másfél W-os elfekvő lézer fejem. Vágás közben számomra impozánsan dolgozik, igazából én sokkal kisebb teljesítményre számítottam.
A lényeg, hogy a gyorsjárati sebessége biztosan legalább a duplája egy éti csigáénak. "a méretével nem fog nőni a fordulatszám..." ezt tudom, csak arra gondoltam, hogy nagyobb nyomatékkal könnyebben mozgatja a cuccot, később veszít lépést a gyorsulásnál, ha sikerül alaposan megpörgetnem.
Egyébként köszönöm, elsőre ilyesmi hozzászólások kellenek, hogy mindent megértsek, később "jöhetnek a képletek" A görgő is jó gondolat, arra már korábban rájöttem, hogy ne feszítsem túl a húrt -szíjat-. Éreztem, hogy úgy sokkal nehezebben megy kézi mozgatáskor.
Nem tudom milyen lézeres holmikkal hasonlítod össze, de ez egy félvezető lézer 1,5-2W max teljesítménnyel. Nyilván nem fog úgy dolgozni mint egy kW teljesítményű ipari.
Ekkora mechanikához ezek a motorok elegendőnek tűnnek mivel viszonylag kis tömeget kell mozgatni. Mivel léptetőmotorok a méretével nem fog nőni a fordulatszám... ezáltal a sebesség sem ahhoz kicsit komplexebb megközelítés kell. A sebességet befolyásolhatja, a léptető impulzusok frekvenciája vagyis ha nem tud kellően sok impulzust adni a vezérlő és nagy a beállított mikrolépés akkor lassú lesz a mozgás cserébe viszont nagy lesz az elméleti felbontás. A motoráramot be kell állítani rendesen, műszerrel a motornak megfelelően. Persze kérdéses, hogy közben nem ment-e tönkre valami... Az persze lehet kérdés, hogy mekkora ellenállást képviselnek azok a görgők amik a nútokban futnak... Ha szorulnak akkor lehet gond...
Először megpróbálom kideríteni, hogy a léptető motorok mit tudnak, mert az egész cucc iszonyú lassú volt alapból. Amilyen lézeres mozgásokat látok, annak az 1%-át ha tudja a gép. Ha ez a motorokon múlik, akkor először azokat kell lecserélnem.



 ) akkor írhatnánk mindig egy új képletet rá. Ezért azt a képletet kell használni, ami az adatlapon van, és nem lehet mellényúlni.
) akkor írhatnánk mindig egy új képletet rá. Ezért azt a képletet kell használni, ami az adatlapon van, és nem lehet mellényúlni.