Keresek de nagyon nem találok GRBL1.1h hoz arduino nano panelhez lábkiosztást, ha valaki esetleg találna és adna egy linket az jó lenne....
Köszi!
frob | 2339
2025-02-22 09:26:14
[2063]
Sziasztok
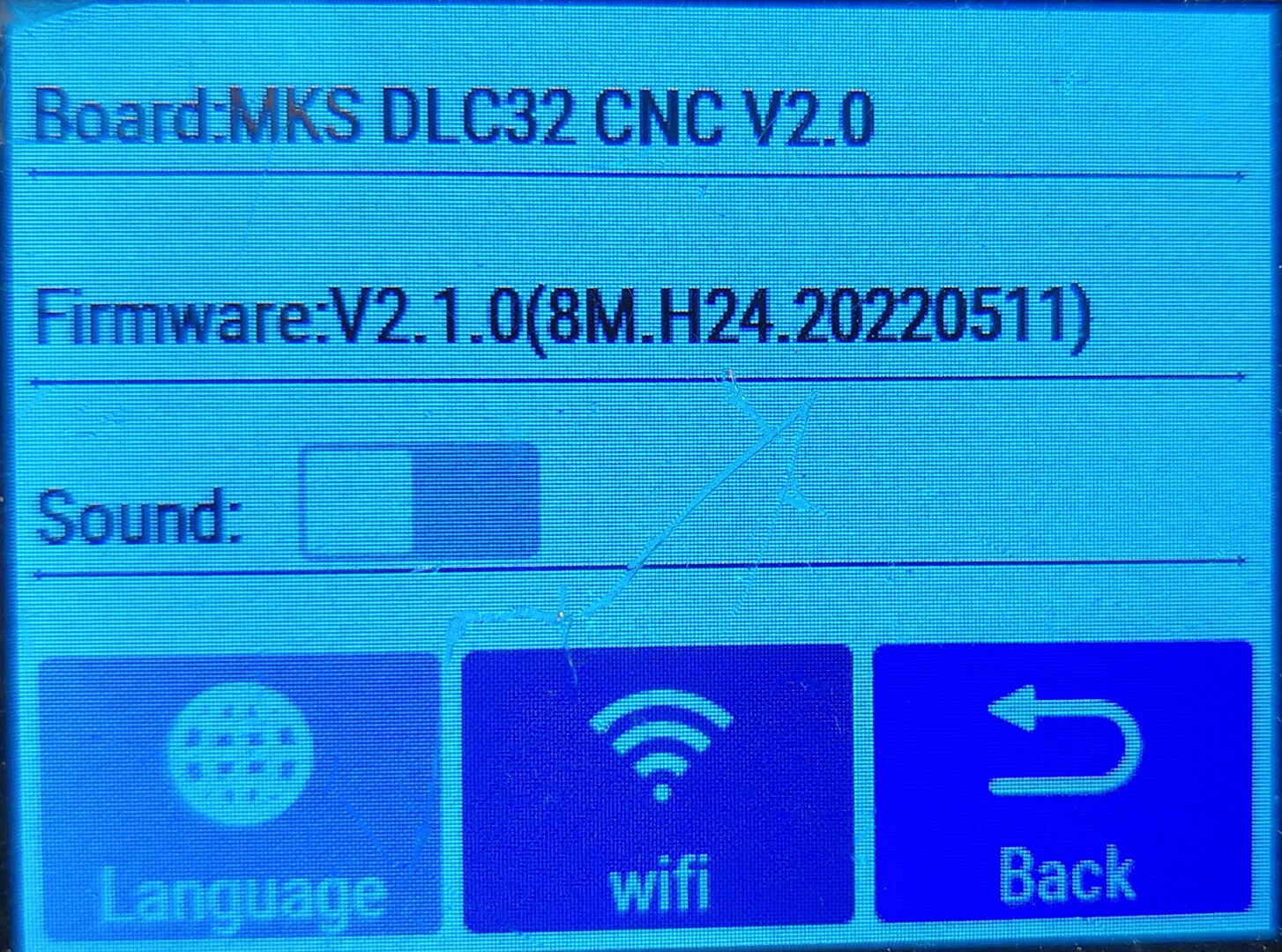
mks dlc32 v2.1 panelhez keresek frissebb fw-t, ha valaki esetleg használ ilyet megosztaná hol találok fw-t hozzá, mert a neten millió találat nem tudom melyik a jó hozzá....
mellékelek képet is...
gsender-el használnám, valami tapasztalat?
előre is kösz
dpu | 22
2025-02-12 14:42:15
[2062]
Sziasztok!
Keresek némi szabadidővel és arduino programírási képességgel rendelkező egyént egy projekt erejéig.
Köszi.
Aknai Gábor | 3191
2024-12-30 08:52:07
[2061]
Köszi mindenkinek, különösen Frob kollégának a sok segítséget a témában.
Úgy tűnik, hogy az RX nem megy a nextion-ön, kénytelen leszek újat venni. Persze attól még tesztelésre ok, SD kártyával fel tudok rá tölteni különböző projekteket, csak éppen Arduino-val már nem fog működni, mivel az RX csatornának annyi.
üdv, Gábor
simpi | 4
2024-12-28 15:05:32
[2060]
Régen Nextionoztam, de nekem úgy rémlik, hogy a távirat végén kell küldeni 3-szor dec255-öt(vagy 3x hexa 0xFF).
ez ha nyomkodod a reset-et akkor egyszer kiküldi a signal lost szöveget és meg is jelenik üres lapot létrehozol a nextion ban, feldobsz egy szövegmezőt, adsz neki valami fontot, utána ardura fel a kód, majd összedug a kettő, amikor nyomsz resetet kiírja...
közben néztem a az előző kódodat, felejtsd el a nextion.h libet nem kell, mert ha azt használod, minden bizonnyal teljesen másképp kell meghívni mint ahogy én mondtam.
nem kell semmi várakozás sehova, írod olvasod... amit írtam példát próbáld ki csak baudrate legyen jó mindkét oldalt, és ha nincs messze egymástól a két eszköz told fel 115,2k-ra
menni fog!
nem annyira agysebészet a nextion, hogy kelljen hozzá lib...
mega328 az az egy sima ardu proci, amit felraktam egy saját panelre, olvas két modbus csatornát, abból kreál két pwm jelet kezeli a nextiont, és és külön kapacitiv touchot olvas be i2c-n mert az egész nextion egy 6mm -es ragasztott üveg mögött van, hogy ne bassza szét a kezelő, így ügye a rezisztív touch kiesett...
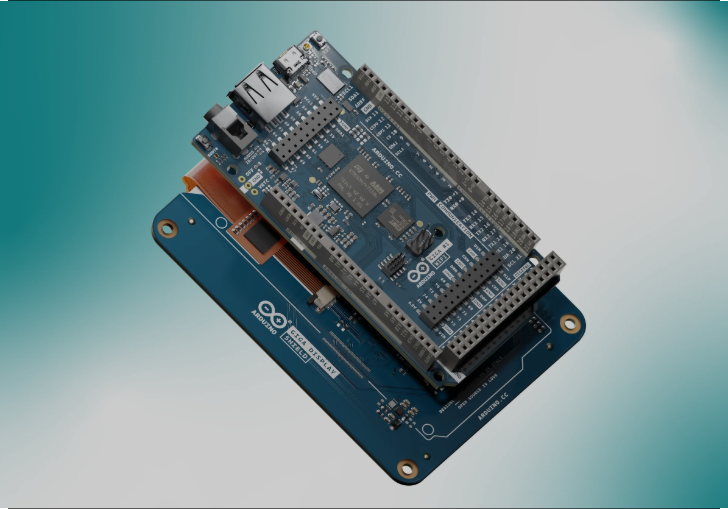
Ezt így megeszi az arduino IDE, ha máshogy írom, akkor nem. Lehet még egy kicsit szórakozok vele, de már kezdem unni a dolgot, szóval valszeg váltás lesz egy komolyabb és kompaktabb Arduino-ra, mert ez a 2 eszköz valahogy nem akar együttműködni. Ráadásul a nextion egy csomó műveletet nem akar végrehajtani, ez is a váltás mellett érvel.
Az új kiszemelt kombó, az Arduino GIGA R1 WiFi és Arduino GIGA Display Shield.
amit még tehetsz, hogy tényleg a oda vissza soros-t lásd usb TTL rs232 átalakító ftdi vagy cp vagy valami kínai..
RX lábat 1-1- diódán keresztül rákötöd a soros RX TX re így az oda vissza közlekedőt látod terminálban, nem pedig egy külön kiíratva, ami sokszor baromira nem ugyan az mint ami egyébként kimegy diódák leválasztják egymástól a két vonalat így nincs kavarodás, de mindent látsz..
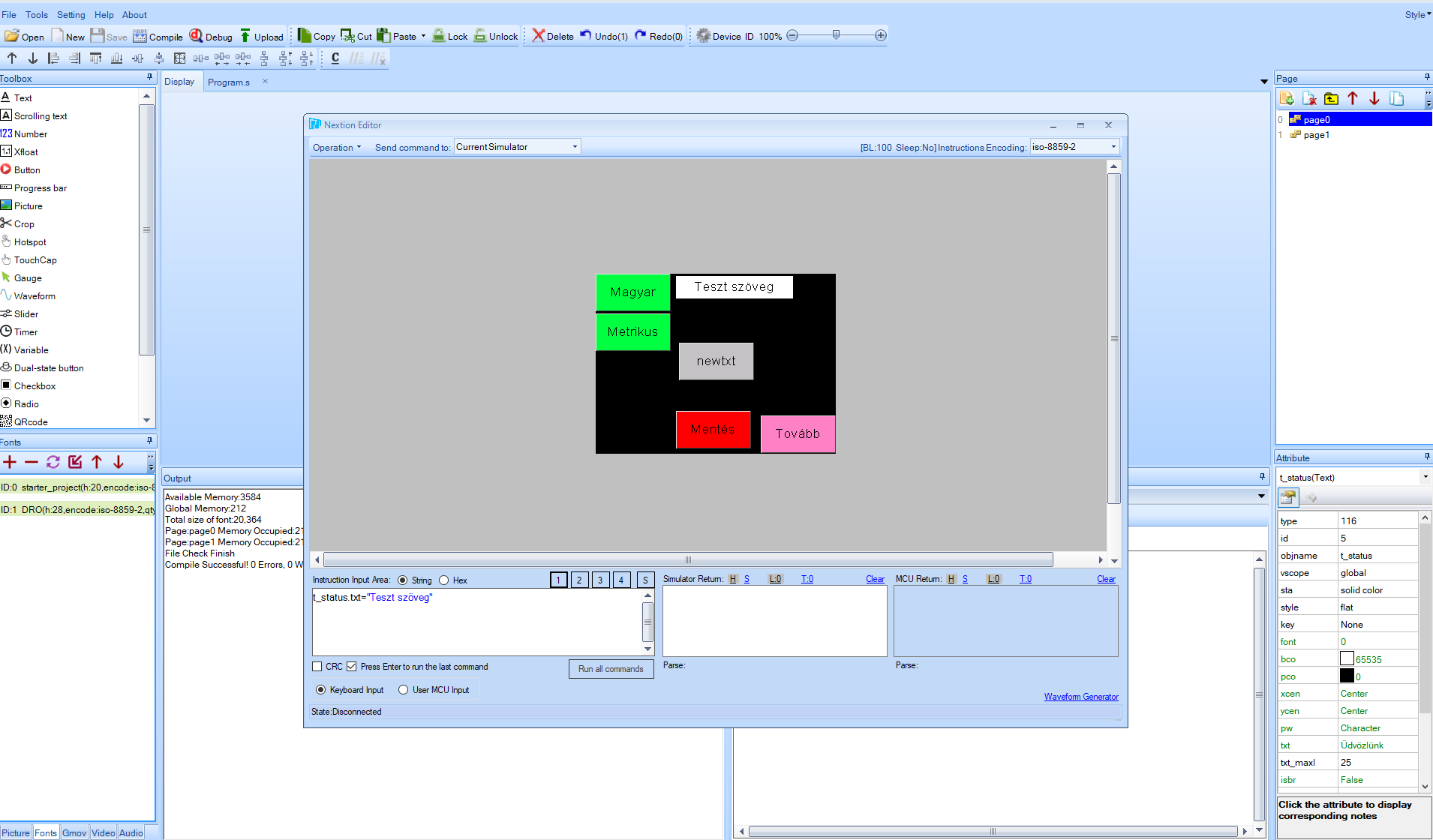
Itt most csak a tesztszöveget próbálnám kiíratni az adott text ablakba, de nem csinál semmit a nextion a fizikai kijelzőn. Viszont a nextion debuggerében frankón kiírja ha manuálisan írom be a parancsot.
morvfer7 | 2578
2024-12-25 20:27:29
[2049]
bocsi, nem írtad meg, hanem UNO-ra fordítottad le a programot. este van...
ha UNO-ként írtad meg a programot, akkor UNO lábkiosztás szerint fogja csinálni. Ha csak mint chipet külön akarod használni, akkor a programban saját magad döntöd el, hogy melyik lábnak mi lesz a funkciója.
A feltöltéssel nincs gond. Az a kérdés, ha a kopasz atmegán a 22-es és a 23-as lábat akarom használni akkor az arduino ide programba minek deklaráljam?
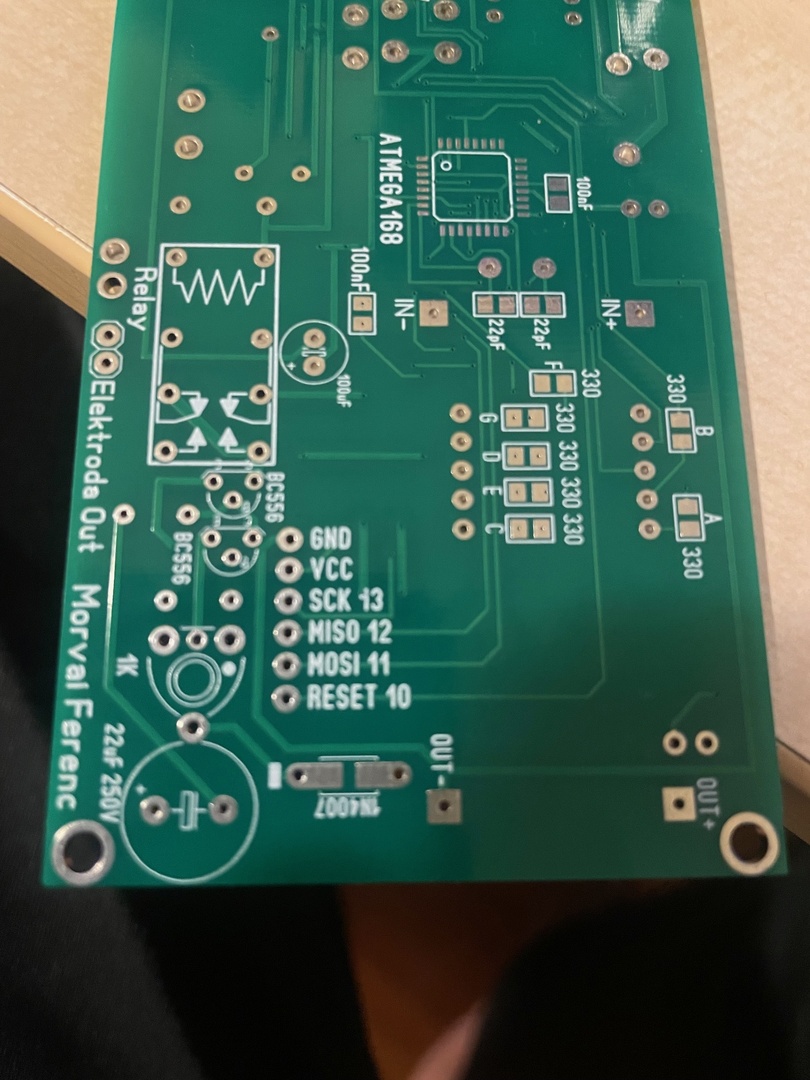
A kolloid készülékeken így töltöm fel a tartalmat, mert amikor elszálltak az arduino modulok árai és sikerült vásárolnom panelokat, amiken ATmegák voltak, kedvezőbb lett az ár. Mellékelt képen a lábak, amin keresztül töltöm fel a programot.
Nem kell módosítani a pineket a kódban, mert az Arduino IDE elvégzi ezt. A feltöltéshez válaszd az "Arduino as ISP" módot, persze előtte az UNO-ra töltsd rá a példákból az ArduinoISP-t. Állítsd be az ATmega328-at a feltöltéshez.
Program feltöltése az ISP bekötés szerint: MOSI - UNO Pin 11 → ATmega Pin 17 MISO - UNO Pin 12 → ATmega Pin 18 SCK - UNO Pin 13 → ATmega Pin 19 RESET - UNO Pin 10 → ATmega Pin 1 GND és VCC +5V bekötése is kell.
Ha nem indulna el a feltöltés, akkor a VCC és RESET láb közé egy 10K ellenállás.
Csak az ATmega feltöltéséhez szükséges a kristály és a két lábán 1-1 22pF kondenzátorral a GND-re.
Sziasztok! Abban az esetben , ha egy Arduino UNO alaplapon kereszesztül (MISI-MOSI bekötéssel) töltöm fel a programot egy kopasz Atmega328-ra akkor a pineket hogyan kell deklarálni ? Ami az UNO-n 10,8,11,1,A0,A1,A2,A3 az mielőtt betöltöm az atmegában módosítanom kell valami másra? Az eredeti program is UNO-ra készült. Feltöltéskor UNO-t vagy Atmega328-at válasszam ki? Köszönöm a segítséget!
Így karácsonykor kicsit megállt az élet, sokan a TV előtt, sokan filmeket néznek, nekem már elegem lett belőle és gondoltam most lesz időm megcsinálni amit már rég szerettem volna.
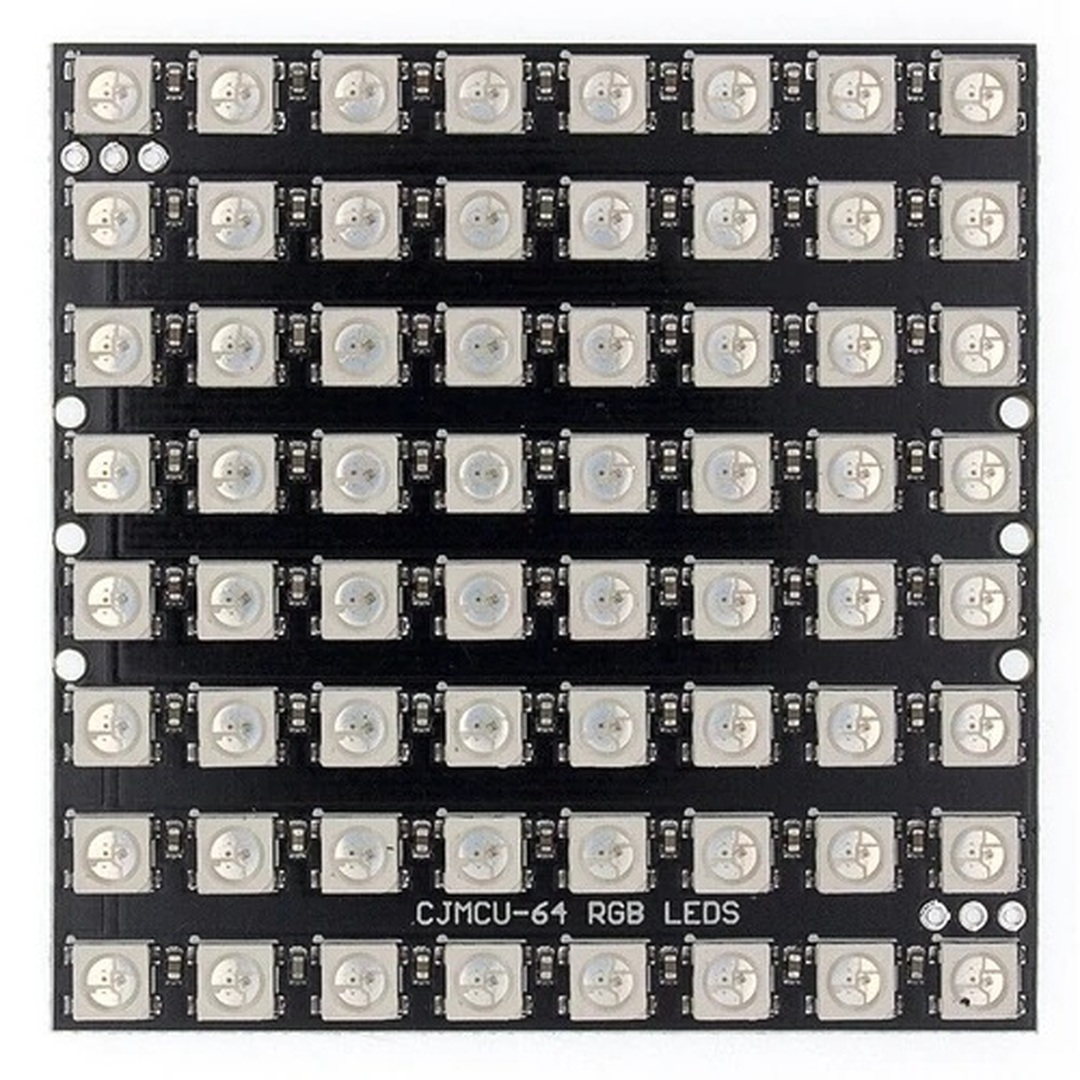
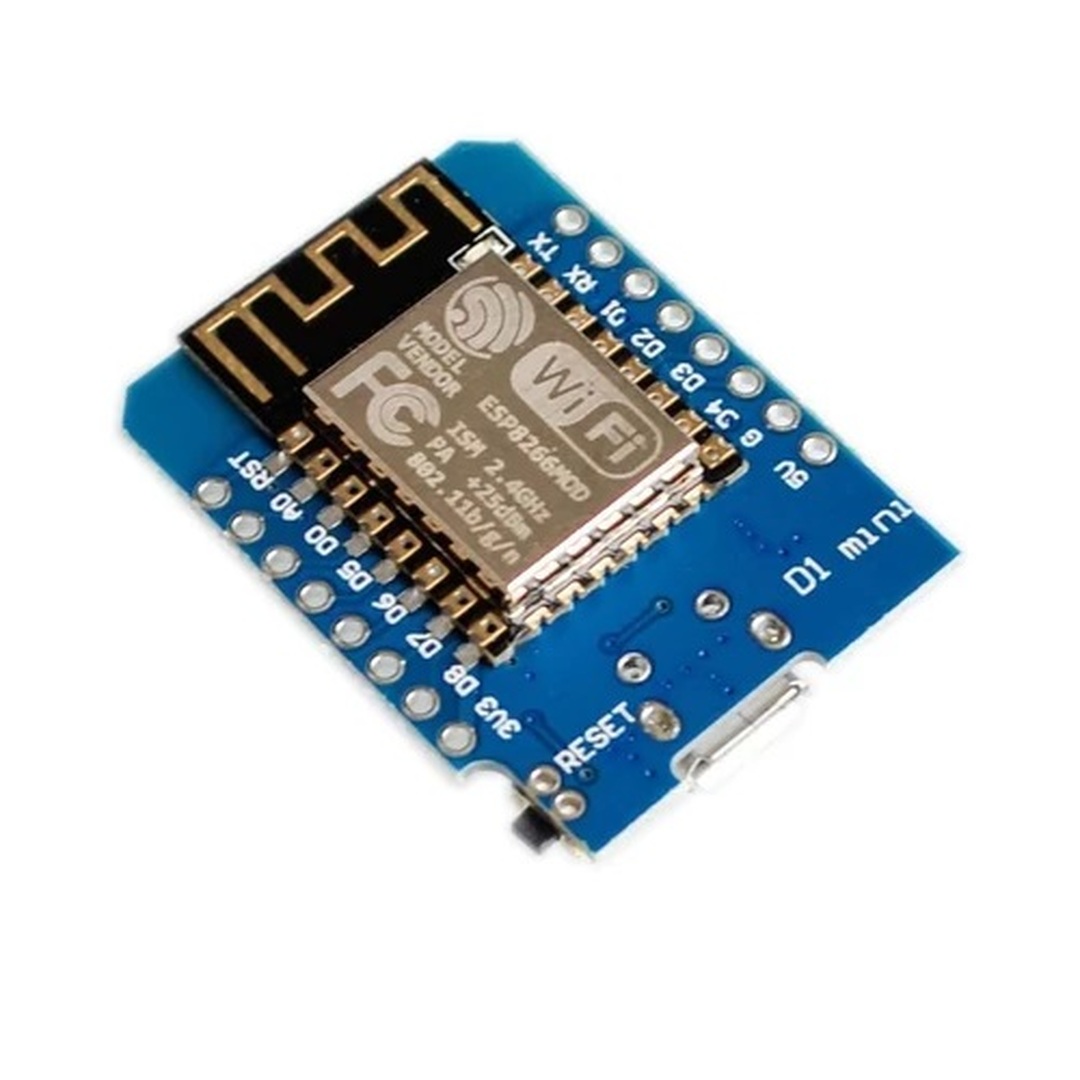
Pár hónapja vettem színes 8x8 ws2812B led mátrixot, amivel egy szivárvány színben meg lehet jeleníteni a pontos időt, dátumot, esetleg kiegészítve hőérzékelő szenzorral, még a hőmérsékletet és páratartalmat is.
Hogy olcsó és pontos legyen az óra, így a jól megszokott NTP szerveres megoldást választottam egy Arduino D1 minivel, de akár kiegészíthető óra modullal is, ha szükséges.
Már 1 darab 8x8 mátrix modullal is jó szerintem, de a jövőben még veszek hozzá és akkor bővítem 40x8 mátrixra.
Ha valaki szeretné megépíteni itt közzé teszem a kódot hozzá, most karácsony alkalmával volt időm összehozni..
// 2024-12-24 // NTP óra wifi managerrel, hh:mm:ss kijelzéssel, D1 mini valamint egy 8x8 WS2812B led mátrix kijelzőn // Minden egész percben megjeleníti a dátumot is. dd/mm/yyyy formátumban. // Ha az idő másodperce kisebb mint 7, akkor a dátumot jelenítjük meg, egyébként az időt. // 8x8 WS2812B mátrix kijelző - D1 mini bekötése - V+-5V, V--GND, IN-D3
// WS2812B mátrix inicializálása matrix.begin(); matrix.setTextWrap(false); // Nincs automatikus sortörés matrix.setTextSize(1); // Kisebb betűméret matrix.setBrightness(20); // Halványabb fényerő (20-as érték)
// LED teszt lefuttatása ledTest();
// Az idő folyamatos frissítése timeClient.update(); }
void loop() { timeClient.update(); // Frissítjük az időt
int second = timeClient.getSeconds(); // Másodperc lekérdezése if (second < 7) { displayDate(); // Ha másodperc < 7, dátumot jelenít meg } else { displayTime(); // Egyébként az időt } }
// LED teszt: Egyesével kapcsolja be a LED-eket szivárvány színnel void ledTest() { matrix.clear(); for (int i = 0; i < matrix.width() * matrix.height(); i++) { // 64 LED esetén (8x8 mátrix) int x = i % matrix.width(); // Oszlop koordináta int y = i / matrix.width(); // Sor koordináta matrix.drawPixel(x, y, ColorWheel((i * 4) & 255)); // Szivárvány szín kiszámítása matrix.show(); delay(100); // 100ms késleltetés minden LED bekapcsolása között } delay(1000); // Várakozás a teszt után matrix.clear(); // LED mátrix törlése a teszt végén matrix.show(); }
Hello! rp2040 MicroPythonra szeretnék egy kódrészletet átírni arduino c++ rol eben van meg a kész rész! digitális toloméró kiolvasása a cél MicroPythonban de erre nincs találat sehol sajnos!
#include <Arduino.h>
#define CLOCK_PIN 26 #define DATA_PIN 25
#define BUFFER_SIZE 23 #define DATA_PERIOD_MS 80
uint8_t buff[BUFFER_SIZE];
uint8_t bitPos; unsigned long lastPeriodMs;
void IRAM_ATTR _CLK_ISR() { unsigned long ms = millis();
if (ms < lastPeriodMs) lastPeriodMs = ms; if (ms - lastPeriodMs < DATA_PERIOD_MS) return;
A zip-nek semmi baja. Csomagold ki valahová, majd találsz benne egy LCD16x2 könyvtárat. Ezt másold be a libraries könyvtáradba. (Nem írtam le külön, de tényleg mókolni kellett vele, mert a zipben nem logikus helyen van.)
Nem biztos, hogy van értelme sok energiát fektetni a program átírásába. (Igaz, továbbra sem néztem még bele, válaszolni is két nap alatt sikerült...) Sok működő és ingyenes ELS projekt van a neten, esetleg érdemes olyanra vadászni, amelyik nem valami speckó alkatrészre épül.
Megoldodott részlegesen probléma. Nem hagyott a dolog nyugodni, egy másik program szerkezete adta az ötletet. Az ino elindítása után kéri, hogy könyvtáron belül legyen, ez rendben, de a többi alkönyvtárt nem hívja meg, kézzel kel bemásolni. Másolás után elindul, problémát az a francos kijelző okozza, mert a gyári zip, biztosan hibás, mert könyvárba történő meghívása után, azt mondja, nem tartalmaz megfelelő könyvtárat. Másik könyvárral (16x2) elindul, de egy ponton, amikor a gombokat keresi, elakad, mert ebben nincs gomb definiálva. Most már csak az a kérdés honnan lehet hibátlan OLIMEXINO-328-LCD16x2 könyvtárat letölteni, vagy <LiquidCrystal_I2C.h> re átalakítani . Még egyszer köszönöm a segítő szándékot.
Nekünk az UNO-s menetvágóban, bár Assemblerben írt programmal, az 1200-as fordulaton az 1000-es encodert le tudja kezelni úgy, hogy közben marad egy kis ideje a kijelzőre is. Ha jól számolom, akkor ez 80 kHz. C nyelven nyilván nem tudja ezt a sebességet produkálni.
Nem mélyedtem el a programban, még felületesen sem. A múltkorában viszont találkoztam egy olyan enkóder könyvtárral, ami állítólag kb. 30 kHz-ig bírja UNO esetében.
Az enkódert általában nem szokás lekérdezni, hanem olyan lábra van bekötve, amelyik tud megszakítást generálni és egy pici de hatékony kód lépteti a számlálót amerre kell. Egy felületesebben megírt változattal 20 kHz környékéig eljutottam pár éve, tehát ha jól van megcsinálva, akkor működhet.
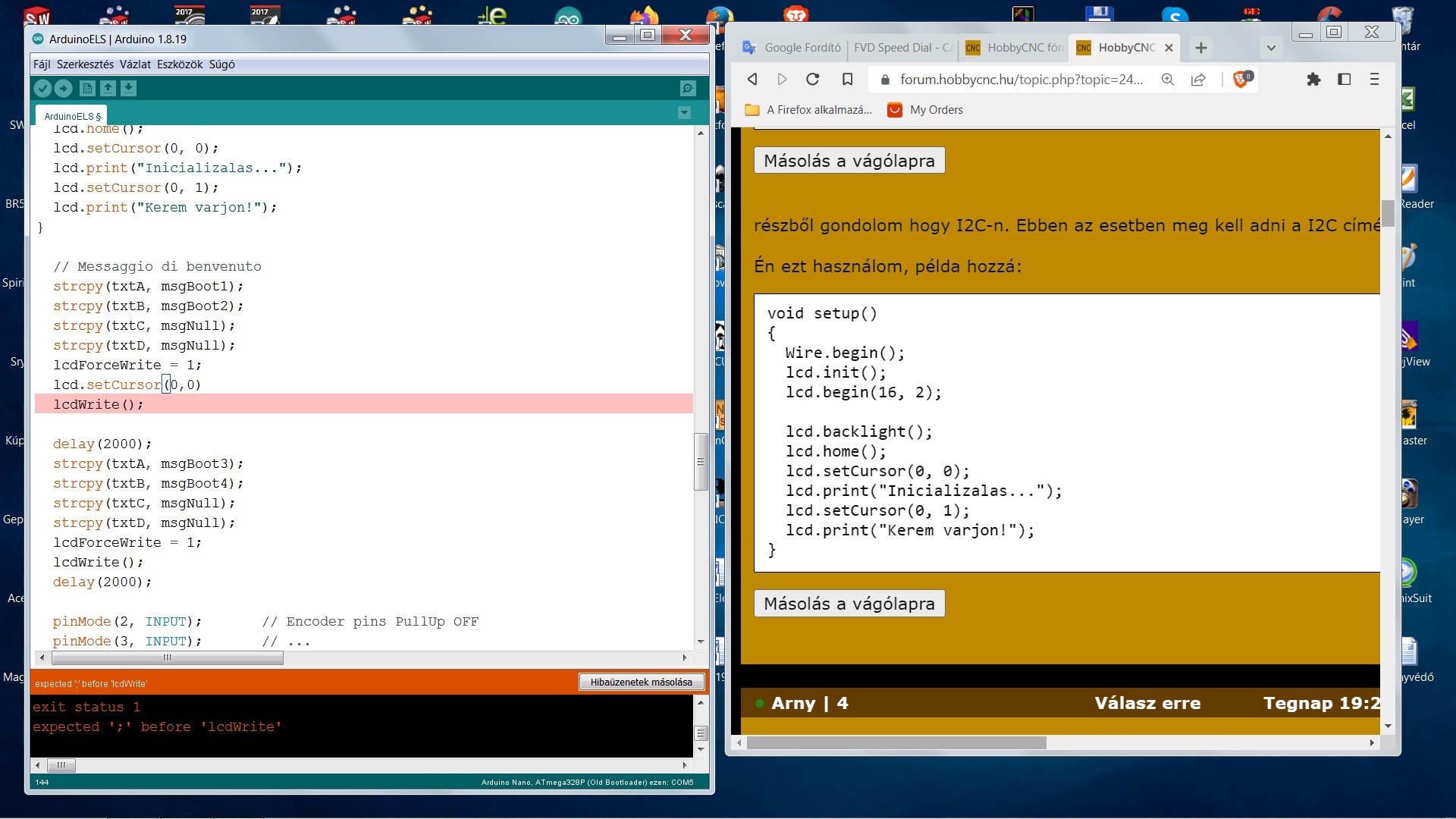
Bemásoltam az általad ajánlottat,legalább tovább megy de a képen látott helyen ismét elakad. Még nem töltöttem lapra csak ellenőrzés módban futtattam. Az Olimexino-val már tegnap próbáltam. Jól láttad LiquidCrystal_I2C lcd(ADDRESS_LCD,16,2); vel próbálom, egyszerűbb mint a sima 16x2.
Az LCD, amit használ az itt található. Ha csak nincs ilyen modulod, akkor nem érdemes ezzel küzdeni, mert a modul kezeli a gombokat is meg a képernyőt is egy PIC segítségével. Ugyanezen a lapon megtalálod a keresett library-t is, de van benne egy hiba. Az LCD16x2.cpp-ben az
Üdv, Amennyiben hibaüzenet is bemásoltad volna egyszerűbb lenne. Illetve az sem ártana tudni, hogy mely arduinot használod (uno,mega) Az LCD-t hogyan hajtod meg?
Tiszteletem a fórum társaknak. Program cserekerekek kiváltását hivatoot szolgálni, Segítséget szeretnék kérni, program futtatásában. Program LCD hibával tér vissza. Vagy négy különböző könyvtárat is letöltöttem, de egyiket sem fogadja el, zip könyvárba feltelepülnek. Sajnos a programozáshoz nem értek, csak használni tudom, ha hibátlan a program. Segítséget előre is köszönöm.
Csak még annyit, hogy pl olyan tiny-re amivel arduval már nem tudsz semmit, ezzel simán, mivel nem boot loader- en keresztül tolja le hanem a programozó készülék oda veri bele ahonnan a progi indul, tehát a bootloader helyére is tolhatsz progit!