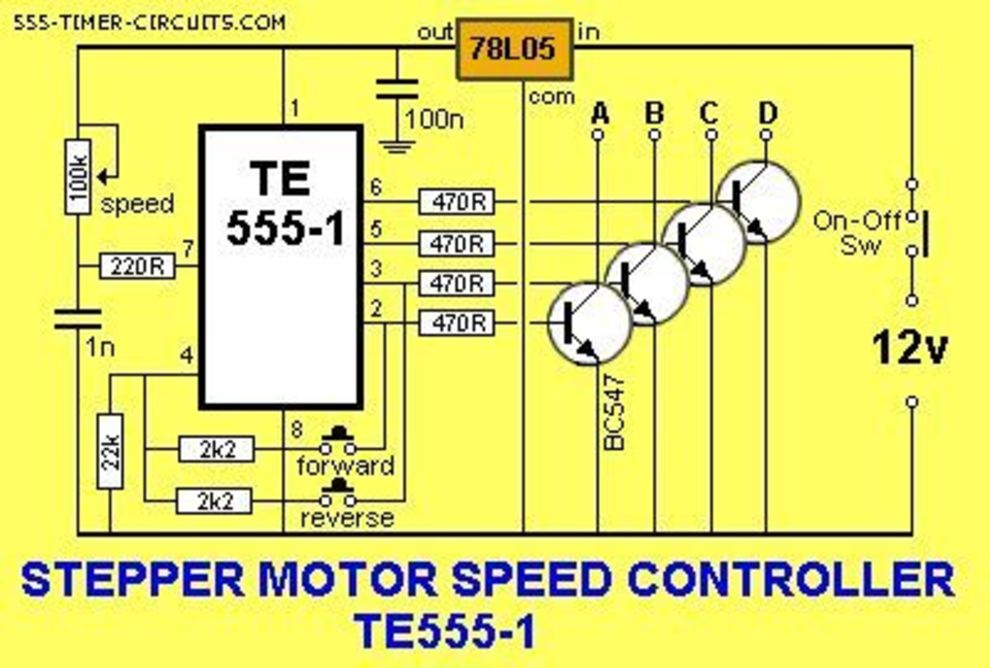
"This is a bogus circuit. The TE555-1 is not a 555 timer chip, It is a MCU prototype bipolar stepper motor controller with totally different pin assignments, and is also unavailable. This circuit does not belong on a 555 circuits book or page, or anything else for that matter, because it cannot be found."
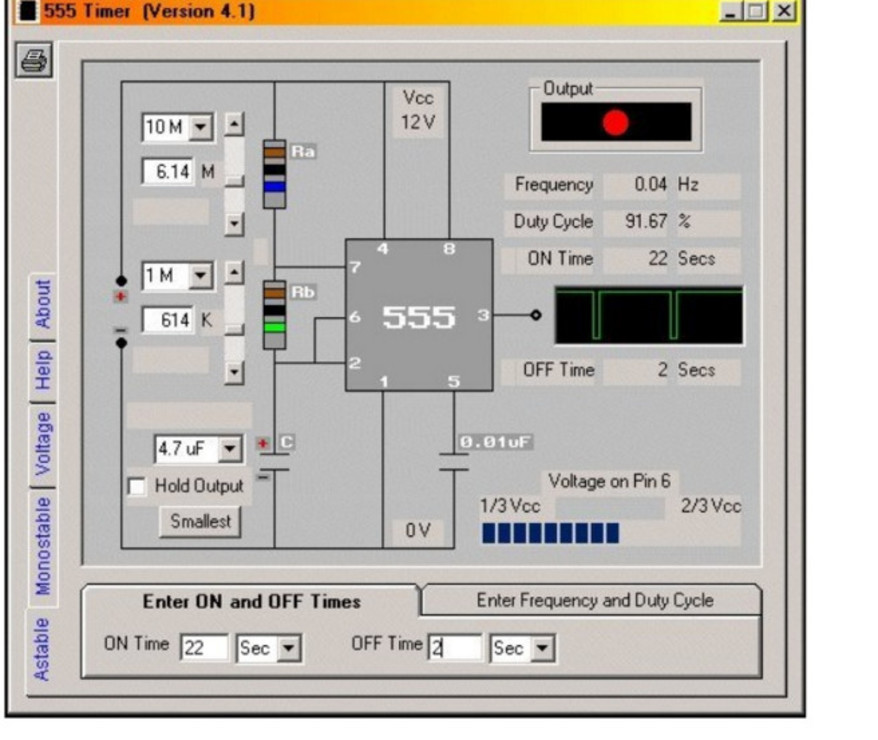
Az internet tele van dezinformációval, virtuális idétlenséggel, hazugsággal, mindent elfedő csicsával, amiknek a tényekhez, valósághoz semmi köze. Ennek lettél az áldozata (elhitted, amit látsz), mert a mellékelt kapcsolás működésképtelen számos ok miatt. Elvi hibáktól hemzsegő dolgokat nem kell kipróbálni, elég ha tudjuk, mi lenne a jó megoldás, mi a működési alapja egy 555-ös IC-nek, mi a helyes lábkiosztása. Hiszen ezen a kapcsolási rajzon már az IC tápfeszültség bekötése se stimmel, így step jelek helyett inkább füst jeleket fog ez küldeni.
Az nem kizárt hogy működik, de ez csak és kizárolag valami kényszer megoldás lehet. Eleve az 555-nek 1 kimenete van, tehát 4 tranzisztort nem hajthat függetlenül. A 2 es láb bemenet(trigger) a rajzon kimenetnek van használva. Aztán meg a jelalakok milyenek lehetnek arról ne is beszéljünk.
Persze. Hiszen csak annyi az egész, hogy a potméter tekergetése step/dir jelet eredményezzen egy elektronika kapcsán, és ezek a jelek a léptetőmotor vezérlővel is összeköttetésben legyenek. És már forog is a motor.
A komolyabbak pedig még forgásirányt is váltanak a potméter középállásánál, így nem kell kapcsolóval vacakolni. Szuper ilyen kis áramkör fejlesztéseim vannak.
Egy az egyben viszi, úgy látszik a magsabb fordulatokat nem szereti. A villámjáratom 800 a gyáriaknak sem szoktak 1000-1200-nál többet adni mert összerágnak a felületek.
Nálam két 20/5 orsó van áttétel nélkül,a híd 170kg a gyorsjárat meg 4500. Nem tudom mekkora a súrlódás de a motornak áttétel nélkül is tudnia kell a 2000.
Ehhez a G.oróhoz, ezzel a motorral, nem feltétlen kellett volna a felező. Bár, nem tudom a mozgatott sújt. A 12 volt feszültségnövelés ebben a tartományban, nem hoz látványos javulást, de hozna. Kicsit erősebb, rugalmasabb lenne. Az ezres sebességet így is bőven teljesíteni kellene. Látatlanba, legalább 1500 -ra gondolok. Beállítási problémákat sejtek. Úgymint: túl nagy mikro lépés, túlzott gyorsítás, stb. A mechanikát is át kellene vizsgálni, szorulásokat, elakadásokat keresve. Esetleg a gyenge PC nem tudja kiszolgálni.
Van egy 8Nm-es léptetőm Longs Motor, DM860A vezérlővel, 60VDC táppal, adhatok neki 72VDC-t, jobb lesz, mármint erősebb és gyorsabb? A vezérlő 80V-ig írja de van értelme, érezhető ennyi változás? X tengelyen van, feleztem egy 5M-es szíjhajtással 25/5-ös golyósorsót hajt, megemelem a sebességet 500mm/min fölé már lépést veszt, pedig jó lenne akár 1000mm/min is legalább villámjáratnak.
Törölt felhasználó
2018-07-28 12:54:44
[5831]
Szia! Van ehhez a kinematikához Robsy CNC vezérlő fejlesztésem. Szívesen segítek, amiben tudok, egy plotter mintapéldányt is megnézhetsz működés közben, ha errefelé jársz. Beszélgessünk a részletekről magánban.
"Megjegyzem, a videón lévő szerkezet méretben és arányokban nagyon sokat csal, mivel a kötélágaknak minden helyzetben a maró központja felé kell(ene) mutatnia."
Ezt így nem lehet kijelenteni, hiszen van olyan transzformációs modell, ami ezt az esetet is kezeli. Az én fejlesztésem is ilyen.
Rajzgépek szoftvere jó hozzá. Arduinoval egyszerű megoldani. polar V
Polar V rajzgépekre (polar V drawing robot polargraf) keress rá a neten, sok infót találsz.
Megjegyzem, a videón lévő szerkezet méretben és arányokban nagyon sokat csal, mivel a kötélágaknak minden helyzetben a maró központja felé kell(ene) mutatnia. Tehát így tervezd a szerkezetet. A motorok nyomatéka meg függ a szerkezeted súlyától. surlódási tényezőktől, forgácsolási erőtől stb.
Mivel itt a forgácsolási erőt minimálisra kell venni, hogy lógó helyzetben a saját súlyától is képes legyen forgácsolni, így 1-2 Nm-nél nagyobb nyomatékra nem nagyon lesz szükség.
Nem írtak vissza. Gondoltam, hogy ez lesz. Nincs több ötletem. A Schneider nem egy olyan cég, aki törődik a kis hobbistákkal.
J-Steel | 1721
2018-03-23 00:59:42
[5824]
Kezd bonyolódni. Ha az amit a képen látunk valóban 2db optikai csatlakozó, akkor még rosszabb a helyzet, mert vagy az egyik a step és a másik a dir, vagy pedig valami szinkron soros port (órajel + adat), ami meg aztán végképp nem lesz sehol dokumentálva.
Lehet, hogy a végén az lesz a legegyszerűbb, ha eldobja az ember a vezérlőt, és valami kínai meghajtóval hajtja.
Nagyon szépen köszönöm! Annyira nem fontos a dolog, hogy mindenáron beüzemeljük, de sajnáltam volna kidobni. Ha eljutok a debreceni talira, jövök egy sörrel.
Az nagyon hülye ötlet, hogy a 1,2,3-as csatlakozók lehetnek a Step, Dir és Enable bemenetek? Ha így lenne, egy optocsatolós BOB-al ki lehetne találni. Ezt találtam közben róla:Berger-Lahr
Az a nagy ALTERA FLEX ic egy hatalmas programozható logikai kapuhálózat. Azt gondolom, hogy a gyártó mérnökei készítették el a kódot, és konfigurálták ("felprogramozták"), hogy a léptetőmotor vezérlését ellássa. Belső méretéből adódóan megfelel erre a célre. Ez tehát nem egy olyan IC aminek az adatlapját letöltjük, és kiderül mit hova kell kötni.
Így már tudok válaszolni arra a kérdésedre: "Ehhez kell külön meghajtó, vagy rá van építve minden?"
Nem kell, erre már rá van építve minden.
Az, hogy mit tett bele a gyártó, hogy melyik lábán milyen jel kell érkezzen, azt a gyártó dokumentálta. Senki más nem tudja.
Ez kicsit olyan, mint amkor egy haver ad egy panelt, amin van egy mikrokontroller, de nem ad dokumentációt, hogy mit hova kössünk.
Esetleg van-e a házán, dobozán, a csatlakozókon írás, hogy a bekötésre rájöjjön az ember?
Tehát mind az öt IC egyforma (LMD18200). És 5 fázisú a stepper. Akkor úgy tűnik, hogy a "végfok" ott van. Láttam szenzort is. Már csak azt kell megnézni, hogy milyen más IC-k vannak a penelon, amik esetleg a vezérlést végeznék. Küldj még infót!
Kérhetnék képet külön az LMD1800T-ről? Arról nem találok semmit.
Annyit találtam, hogy a másik IC, az 18200-as egy max 55V / 3A-es H-Hidas IC, ami irány és impulzus jeleket fogad. Alapvetően DC motor példákat hoz az adatlapon, de azt írja Stepper-re is jó.
Lett egy Schneider Electric (Bereger-Lahr) VRDM564/50 LMA 5 fázisú léptető motorom (70V, 0.95A) Ehhez kell külön meghajtó, vagy rá van építve minden? Nem találok róla semmit a neten Köszi a segítséget!