Én egy gyakorlati példát is tudok mondani , nekem van több méretű , típusú sarokköszörűm (olcsóbb-drágább) , de már mindegyiket szerelni kellet. A drágább kategóriában van mágnes a motor végén , az olcsóbbikban nincs. Ezzel be is fejezhetnénk a történetet , na de ha elkezdek velük dolgozni azonnal kiderül a különbség a mágneses köszörűnek sokkal-sokkal jobb a hatásfoka.
Állítólag ezek a szénkefés motorok nem 230 V-al működnek mint a hagyományos motorok, hanem csak 180-190 V-al pont azért ha csökken a fordulatszám a nagy terhelés miatt az elektronika még rá tud adni plusz 30-40- V-ot , így sokkal erősebb stabilabb a fordulatszám.
„ Miben térhet el egy neves gyártó régi elektronikája a mai, hasonló célú tömegtermékektől?”
Nézegettem régebbi Metabo fúrógépek javítási (amatőr) videóit, és meg is jött a válasz: Egy kicsit újabb, de szintén húsz év fölötti gépről volt szó:
„. A fúró állandó elektronikával rendelkezik (a fordulatszámot egy Hall-érzékelővel figyeli). Ez egy kerek mágnessel van megvalósítva a rotor hátulján (a hátsó csapágy előtt), és amikor összeszerelik, az érzékelő (amely a tápkapcsoló áramköri lapján található) ezt érzékeli és beavatkozik.”
Szóval, ha az enyémben is ilyen van, azzal nem lesz egyenértékű egy mezei, külsőleg hozzá aplikált, kínai PWM.
Természetesen alaposan megvizsgálom, de tartok tőle, hogy az alkatrészek nagy része valami kemény akármivel be lesz öntve. Hamarosan bele kukkantok.
Egyébként lehet, hogy éppen ennek a hibának köszönhette szinte újszerű állapotát, mert emiatt csak korlátozottan volt használható. Tizenöt éve nem volt kézben, ki tudja mióta szenved ebben a betegségben.
Fater a csemperagasztót egy régebbi fúrógéppel kavargatta és azon is elromlott ez a fordulat szabályzó rész, egy ilyet adtam neki és ezt rakta rá, a fogantyúja mellé volt egy kis dobozban odafogatva.
Adott egy közel harminc éves Metabo ütvefúrógép (furókalapács) kiváló esztétikai és műszaki állapotban. 230V 500 W, elektronikus fordulatszám szabályozással. Vagyis éppen az a gond, hogy a fordulatszám szabályozása nem működik. Két fordulatszám fokozatban, amit a fogaskerekek átváltásával lehet elérni, max. fordulaton szépen megy. Csak éppen a kis fordulatszám állító tekerőgombra nem reagál.
Még nem szedtem szét, csak tájékozódom. Kora miatt úgy néz ki, hogy eredeti kapcsoló, elektronika már nem érhető el hozzá. (egyébként is a hasonló árakat nézve gazdasági totálkár lenne)
Meg tudnék alkudni azzal, ha egy fordulatszám szabályozó elektronika külön egy kis dobozban mellette lenne, és a fúrógépet a gyári villásdugón/kábelen keresztül ebből táplálnám. Gondolom ehhez előbb a benne lévő (halott?) elektronikát fizikailag is ki kell iktatni. Maradna a ki/be kapcsoló és az irányváltó. Helytálló ez az elképzelés?
Miben térhet el egy neves gyártó régi elektronikája a mai, hasonló célú tömegtermékektől? Mire figyeljek a kiválasztásnál?
Csuhás | 6690
2024-07-09 12:28:51
[24600]
Tanácsot kérnék: Lehetőség van a cégnél egy spektrumanalizátort venni, amit elsősorban EMC előzetes mérésekhez használnánk. Tud valaki bevált típust javasolni?
emerzee_ | 49
2024-06-24 23:27:55
[24599]
Aham! Rájöttem... Kell mellé tenni egy energiatakarékos izzót... Így már működik! Nagyon köszönöm a segítséget!
Kompresszor helyett próbáld ki egy hagyományos 60W izzóval, és azon mérj feszültséget. Ha az izzó normál fényerővel világít, akkor a relé jó, de a kompresszor induktivitása miatt csak félhullámot kapcsol,(erre utal a félfeszültség is).
Nos a relékkel a következőre jutottam. Az 1 áramkörös elindul, kapcsol, de ha elveszem a vezérlést, attól még bekapcsolva marad a vezérelt oldal, amíg azon meg nem szakítom az áramkört. Utána megint kapcsolható, de megint bekapcsolva marad a vezérelt oldal megszakításáig. A két áramköröst nem sikerült életre keltenem, valószínű hibás. Nem világít a led se rajta. (Vagy én vagyok béna.) Ezeknek egy pinceszellőztetést kellett volna kapcsolniuk. Másik lesz helyettük. Megjött közben a lézervágóhoz is a relé. "Szilárdtest relé MRA-23D2 2A 230VAC" A Variometrumban vettem.https://variometrum.hu/hu/szilardtest-rele-mra-23d2-2a-230vac Valami viszont nem stimmel ezzel se. (El vagyok átkozva reléügyben.) A Sculpfun S9 adja a vezérlőjelet 5V-al. A relén világít is a led. Szakadásvizsgálóval nézve kapcsol is. De kimérve viszont, valamiért megfelezi az áramot. 230V megy be, de csak 127V jön ki. Nem is kapcsol be a levegőrásegítő kompresszora. A "kompresszor" 60W-os. Mit bénázok már megint?
gtibi | 214
2024-06-22 15:22:49
[24595]
Szia, a HY-M285 egy SSR, szilárdtest relé, alkalmazásáról videó - más típus de a működést szemlélteti, röviden: mozgó alkatrész nélkül, minimális primer oldali terhelő árammal kapcsolja a szekunder oldali terhelést, a megadott határ értékeket betartva örök élet +1 nap.Ez a típus csak pozitív jelre működik:
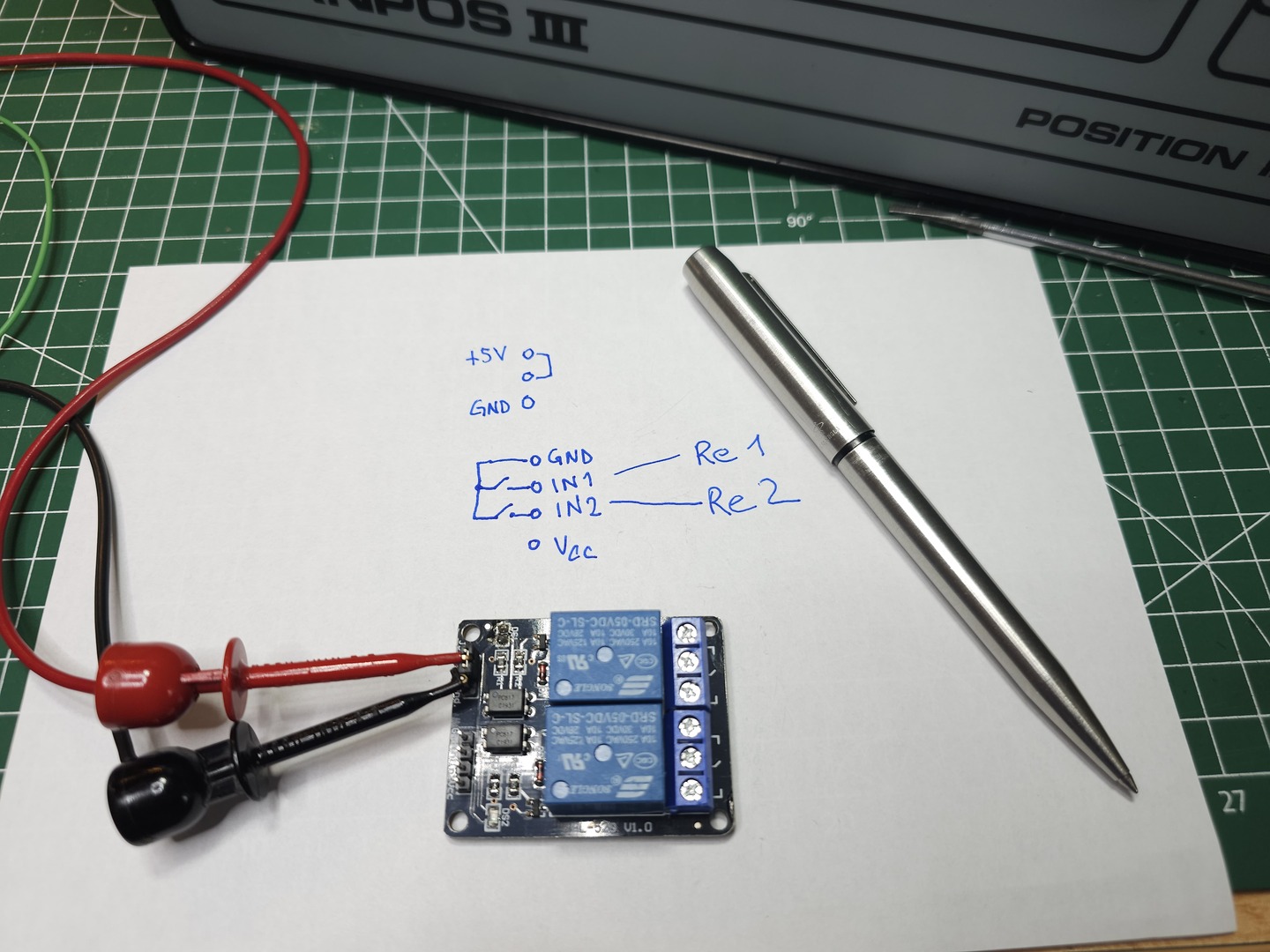
A másik klasszikus jelfogókat használ, a primer oldalon beépített meghajtókkal, mert nem minden mikrokontroller tudja meghajtani, ezért VCC-GND pontokra külső táp, ami lehet ua. mint a kontroller tápja, a bal oldali 3 tüske és jumper pedig a vezérlés módját állítja be, pozitív, negatív logika. :
A vezérlők (arduino) kimenete csak kis áramot tud leadni (10-20mA), a realynek ennél lényegesen több kell. Ezt úgy oldják meg ezek a panelek, hogy a vezérlő csak egy optokaput/tranzisztort kapcsolgat és az hajtja meg a ralayt. Tehát a panelnak külön adni kell egy 5V-ot, nem elég csak a vezérlő 5V-t, GND-t, és a PIN-t összekötni. A jumper segítségével lehet váltani, hogy honnét kapja az 5V-ot: a fent említett 5V-ról azaz az arduinon keresztül vagy más forrásból. 2 reay esetén elbírja az aruinon lévő feszszabályzó is, de ha többet hajtasz akkor inkább másik táppal.
Sziasztok! Kaptam ajándékba egy cipősdoboznyi alkatrészt, ledet, kapcsolókat, áramköri lapokat. Van közte két relé, amit tudnék hasznosítani, de nem jövök rá, hogyan lehetne őket "kapcsolni". Amelyik használata nagyon jól jönne, egy HY-M285 high level triger. Google nem a barátom. Azt látom, hogy 5V kell neki, de nem jövök rá, hogy sima 5v-vel hogyan lehetne vezérelni is. Minden képen kell hozzá valamilyen programozható egység ami kapcsolja. Nekem csak 5V van kapcsolgatva. A másik egy 2 relay module.https://www.amazon.in/Invento-Channel-Module-Arduino-Electronic/dp/B07BSMSC1Q olyan mint ez. Itt se jöttem rá, hogy 5v-al, hogy tudnám vezérelni. Tudna valaki segíteni egy ilyen "muglinak"?
OlyFlyer | 77
2024-06-07 08:46:53
[24591]
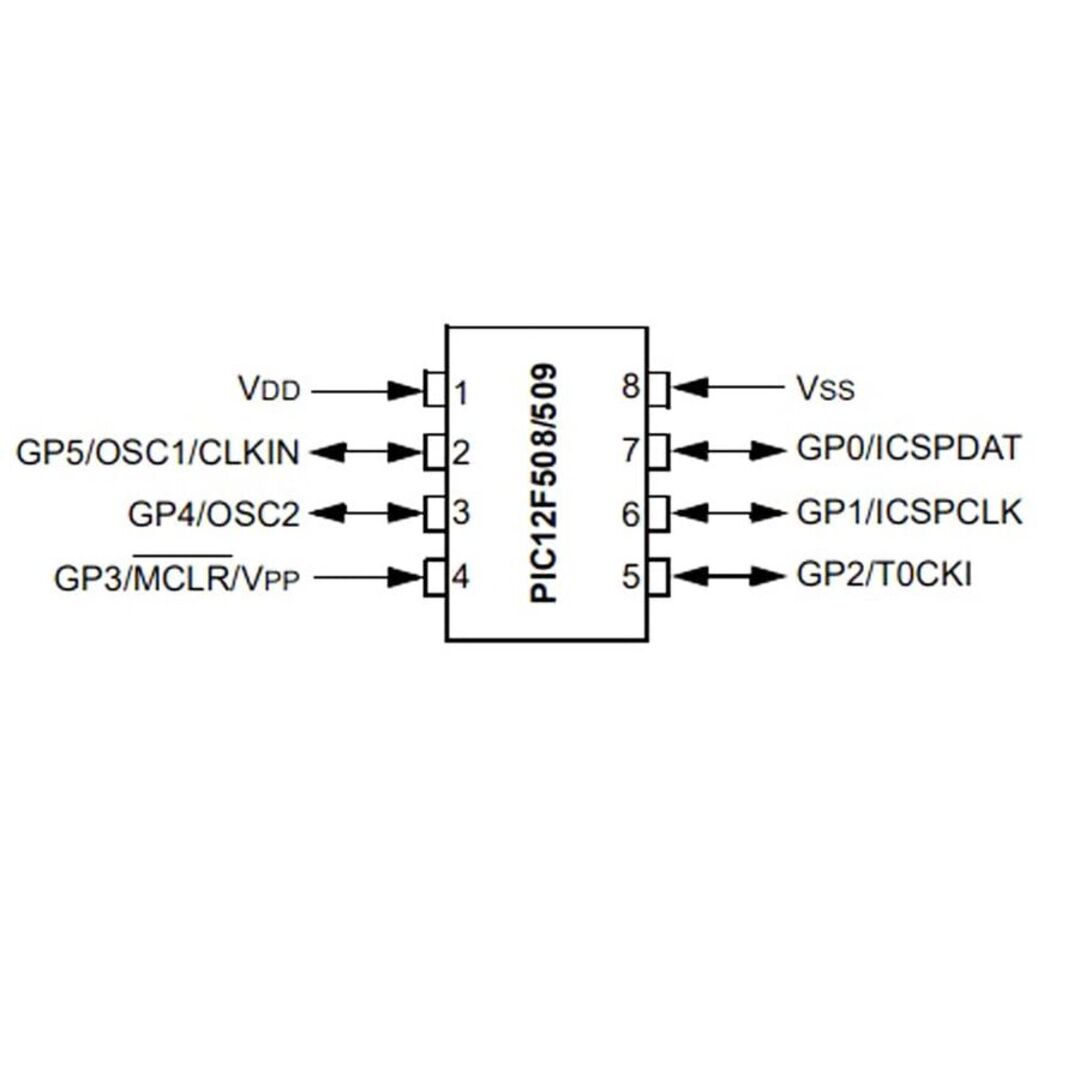
„a 4 és 5 láb csak bemenetként funkcionál”
Csak a GP3 (4-es láb) bemenet, a GP2 (5-ös láb) ki/bemenet.
köszönöm, közben már privát üzenetben kaptam segítséget. a 4 és 5 láb csak bemenetként funkcionál. PIC témában nagyon kezdő vagyok, valójában én arduinot használok szinte mindenhez, csak most sikerült ezt a PC12f508-at olyan olcsón beszereznem hogy elkezdtem vele foglalkozni, főleg azért, mert még belső oszcillátor is van, így még olcsóbbá teszi.
nekem végül is elég a 3 láb is a saját projekthez, de akartam tudni, hogy miért nem működik az összes láb kimenetként. érdekes, hogy a ccs compiler simán lefordította minden hiba nélkül. csak ugye nem működött, ahogy szerettem volna.
az 5-6 lábat elírtam, a 4-5 láb ami bemenet csak, egyéb más funkciók miatt.
2-3 és 6-7 láb az alább leírt tesztprogrammal tökéletes.
4-es láb kizárólag bemenet, az 5-ös láb egy kis variálással lehet kimenet is.
Azzal a 12F508 PIC-el már több mint 20-25 éve nem játszok, de csak assemblerrel programoztam. Itt egy kód ami tudom hogy működik. Ezt használtam tesztre. Ha neked nem működik akkor lehet hogy a PIC-ed rossz. Én arra emlékszem a 508-val sok probléma volt, azért átálltam a 629/675 sorozatra amikor 8-lábasok kellettek kis dolgokra.
Bár nem fontos, de az 5-6 lábon GP2 és GP1 van, nem GP2 és GP3.
sziasztok. szeretnék segítséget kérni, ha valaki használt már PIC12f508-at.
Az a problémám, hogy a kimenetek közül 2 valamiért nem működik, tehát csak a 2-3 és a 6-7 lábon villog a led, az 5-6 lábon valamiért nem, pedig elvileg kimenetnek van beállítva. Tehát a GP0, GP1, GP4, GP5 működik, a GP2 és GP3 pedig nem.
Igazad volt. Ma hozta a postás a relét, a ferritet és a bt antennát. A ferritet felraktam, máris nem problémázott, úgy látszik az usb kábel szedte a szemetet tényleg. Bekerült a bt antenna, így már relét nem kellett cserélni, és az usb kébelre sincs szükség, mert így már nincs gond. Nagyon köszönöm a segítséget!
Egyszer nagyonrég programoztam ilyet. Találtam most egy lengyel oldalt, ott van kábelrajztól szoftverig minden, ezt már nézted? https://www.ebmia.pl/sterowniki-easy-servo-leadshine/38982-serwosterownik-easy-servo-es-d508-hbs86h-20-50-vdc-8a-silniki-09-2nm-pul-dir.html
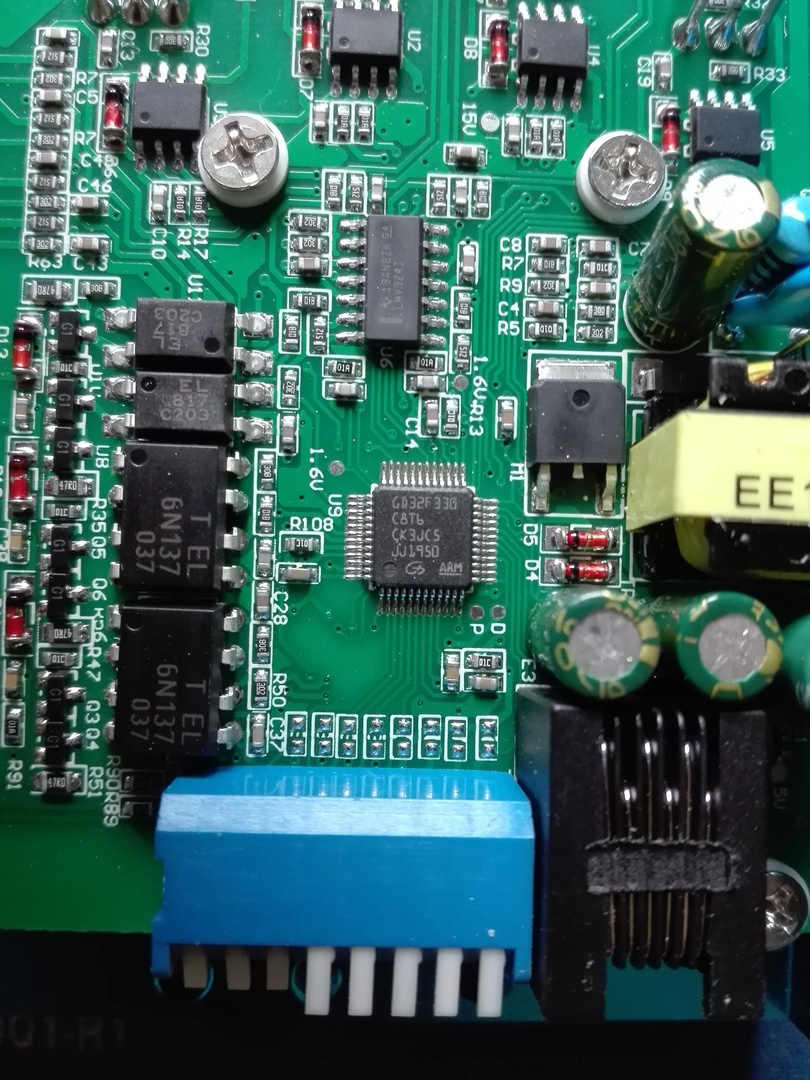
Sziasztok, Használt e valaki közületek HBS57H Hybrid Servo Drive vezérlőt? Egyenlőre csak a gyári beállításait szeretném megtekinteni, ezért egy DB9 - RJ11 kábellel összekötöttem a PC-vel és a LONGS Motor HBS Pro Turn programjával próbáltam megszólítani, de nem sikerült. Ekkor az ELTIMA Serial Port Monitor 4 programjával figyeltem a COM1 porton zajló tevékenységeket , látszólag minden sikeres, de mégsem a konnektált a PC-hez a készülék. Próbáltam egy kínai programmal is Leadshine-nál találtam a programról angol nyelvű leírást, mert csak kínai menűje van. Azzal sem tudtam kapcsolódni hozzá, és ekkor ráadásul hiába monitoroztam a COM1 portot, nem láttam rajta semmi történést, pedig egy külföldi fórumon egy felhasználó azt írta, hogy ezzel a programmal neki sikerült csatlakozni és módosítani a beállításokat is. Szóval kellene nekem, hogy mi a soros kábel helyes bekötése, milyen programmal lehet megszólítani, egyáltalán tapasztalat ha van valakinek vele kapcsolatban, azt megköszönném. Egyébként GD32F330C8T6 Chip van benne. Ott a fórumon azt írta az az illlető, hogy ECON Technology gyárthatja. Köszönöm a válaszokat.
TBS-TEAM | 2693
2024-05-19 16:52:04
[24582]
Sima relé helyett szilárdtest relé alkalmazása. USB kábel amin van zavarszürő ferrit mindkét végén.
de... Újabb kérdés: Itt most teljesen elakadtam. A Sculpfun S9 kapott egy Neje A40640 lézerdiódát. Mivel az S9 vezérlője nem tud átvinni annyi energiát, ami a lézerdiódának kell, így a fej és az S9 ugyanarról a tápról külön leosztással kapja az áramot. Gyönyörűen megy a rendszer. Eddig kézzel kapcsoltam be az elszívót és a kompresszort az air assist-hoz, de az alaplap tud relét vezérelni, ha a Lightburn irányítja. Viszont. Ha bekapcsolom a kompresszort, akkor kb., 10 kompresszor bekapcsolásból 4-8 alkalommal megszakad a kapcsolat a számítógép és az S9 között egy pillanatra. Eddig nem volt gond, mert kézzel indítottam az elszívót és a kompresszort és volt ideje a gépnek visszacsatlakozni az S9-héz, mire indítottam a munkát. Tegnap vettem egy relét, amivel az S9 vezérlője tudja kapcsolgatni a kompresszort. Viszont a lecsatlakozás most is előjön, a munka így megakad. Az egész rendszer 1 elosztóra van rádugva. A gép, az S9, az elszívó és a kompresszor. A kompresszor típusa: Hailea Aco318 Ez egy tó szellőztető. A külföldi oldalakon nagyon ajánlott kategória a lézervágóhoz. Jól is használható vágáshoz. 32 wattos. Ha az elszívót kapcsolom, ott nincs lecsatlakozás, csak a kompresszor kapcsolásnál. Valamiért úgy gondolom, hogy a kompresszor áramlökést generál. A pc tápja kibírja, de az S9 alaplapja egy pillanatra lekapcsol. Hogy tudnám ezt a problémát orvosolni? A tápegység az S9-neje kombinációhoz: 12V 7A. Elvileg a neje 4A-t eszik, az alaplap, a motorokkal, nem hiszem, hogy sokat. (Remélem, minden információt megadtam.) Köszönöm a segítséget!
emerzee_ | 49
2024-05-19 14:54:51
[24580]
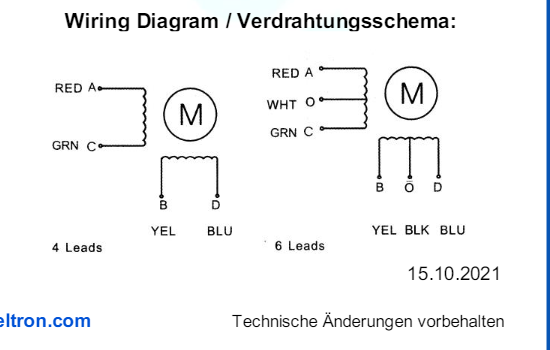
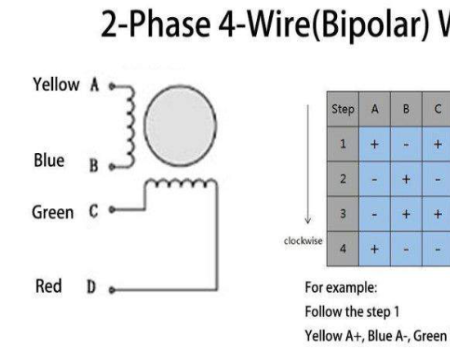
Megcserélve a két középső vezetéket, a motor gyönyörűen működik. Nagyon szépen köszönöm a segítséget!
Sziasztok! Egy kis segítséget szeretnék kérni. Egy Sculpfun S9-en van ilyen motorokkal: 42BYGH1601-B-27DH Van egy 17HS4401 motorom, amit szeretnék egy épített forgatón használni, úgy, hogy átdugom a kábelt az X tengelyről. Nem értek hozzá, lehetséges, hogy a két motor nem ugyanaz? Ha rádugom a 17HS4401-et akkor csak erőlködik, kerreg, mintha a saját maga ellen akarna forogni. Van rá megoldás, hogy működésre bírjam? Nagyon szépen köszönöm a segítséget!
vadember | 1875
2024-05-14 06:15:38
[24575]
Számítógép javítók megcsinálják neked. Nekem a videokártya vezérlő chipet forrasztották újra egy laptopban, 8 ezer Ft. volt.
Érdeklődnék, hogy van-e valaki, aki BGA chipet (kb. 30mmX30mm-es méret) újra tudna melegíteni, esetleg újra golyózni? 2db egyforma panel (monitor vezérlő) lenne, mindkettő ugyanaz (típushiba) amíg be nem melegszik, addig fut a kép.
Haner Roland | 2
2024-05-13 11:56:05
[24573]
Üdv!
Problémába ütköztem, egy kis segítséget szeretnék kérni a következő hibaüzenettekkel kapcsolatban.
A gép és vezérlő típusa: - Mazak QT 10 - Mazatrol TN-1
Hibaüzenetek:
- F CPU 3 error - F RAM error
Hiba fellépésekor a mozgásokat letiltva, néhány óra áramtalanítás után újra üzemképes. Ha valaki találkozott ilyen problémával ennél a vezérlőnél kérem privátban írjon!
Segítségeteket előre is köszönöm!
Distributor | 32
2024-04-18 20:43:32
[24572]
Szia!
Én először a biztonsági kört (safety relay) vizsgálnám meg.
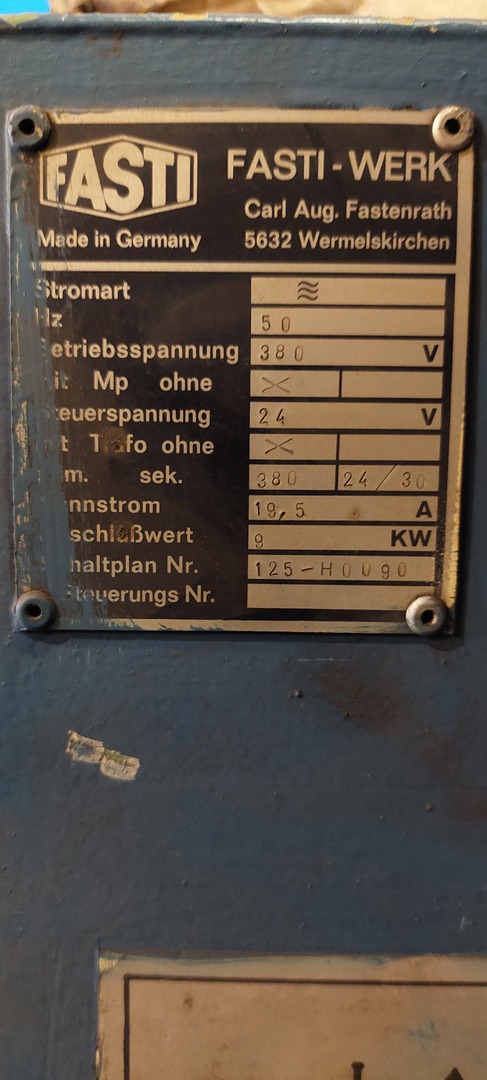
Adott egy fasti lemezvágó, egy tengelyes Elgo Electric TYP85 -ös vezérlő van rajta. sajnálatos módon nem működik úgy ahogy kellene ( speciel sehogy)
Én arra tippelek valahol sérülhetett valami géptesten lévő vezeték, akinek került már ilyen a kezébe tud e ilyenről, vagy esetleg tényleg a vezérlő adhatta meg magát?
Olyan mintha sem a végálláskapcsolókhoz nem menne ki a delej, sem az engedélyezést nem adná ki, hogy megmozduljon a távolság állító motor, az olló mozgatás is csak akkor megy, ha a kapcsolószekrényben az egyik mágneskacsolót kézzel behúzom, akkor öntartásban marad és megy...
előre is kösz!
R.
mex | 1182
2024-04-13 22:42:32
[24570]
Ez a kép a jelenlegi állapotot mutatja. Ha változás lesz, akkor előnyösebb lehet a postai díjszabás, mindenesetre az adminisztrációs díjat a postán keresztül lenyeletik a vevővel,ezután is. Kíváncsi vagyok milyen megoldással áll elő a TME.
Igaz nem olcsó. Viszont ismét bebizonyosodott, hogy nincs új a nap alatt.
TROMF22 | 1421
2024-04-13 17:48:46
[24565]
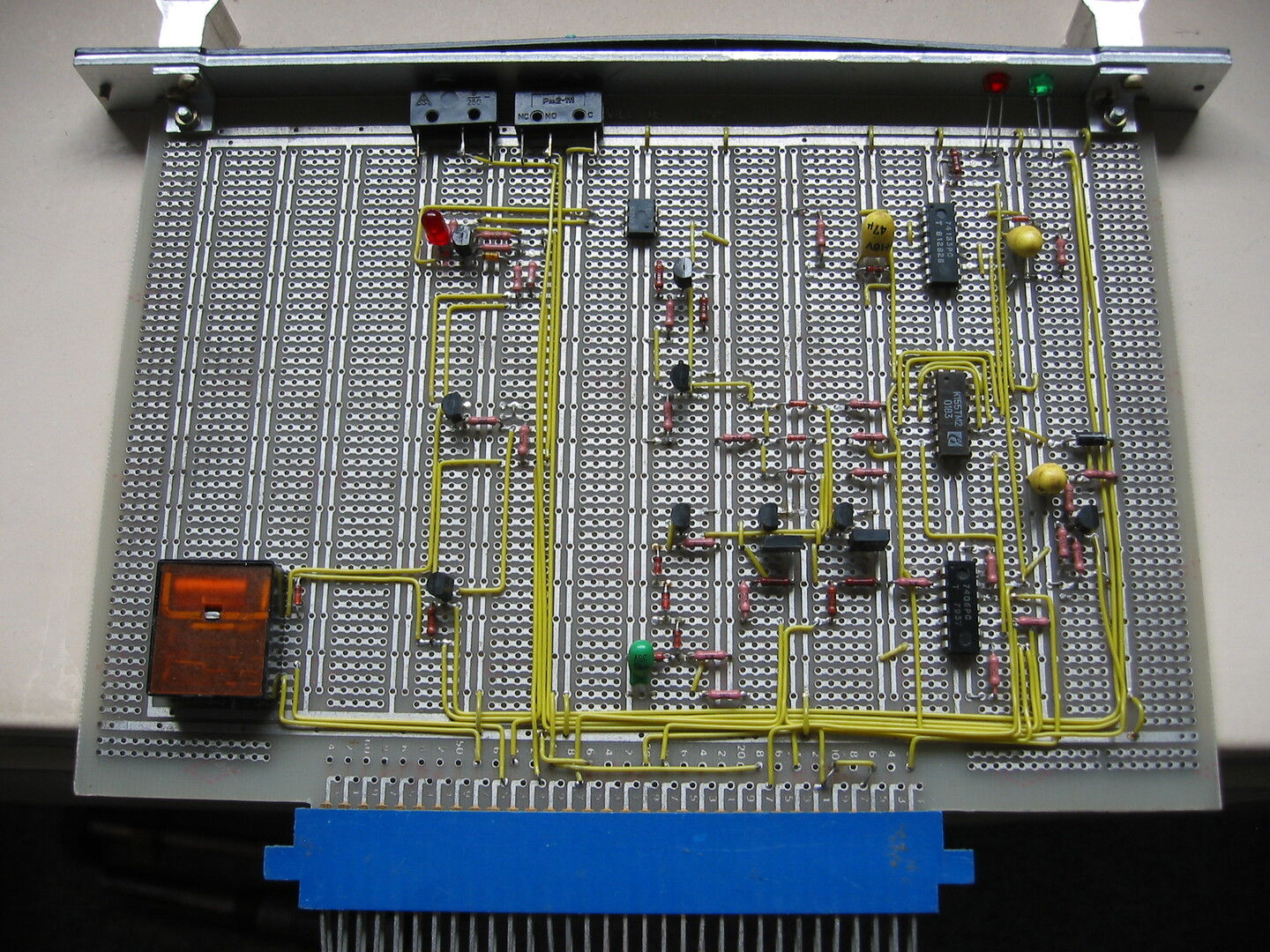
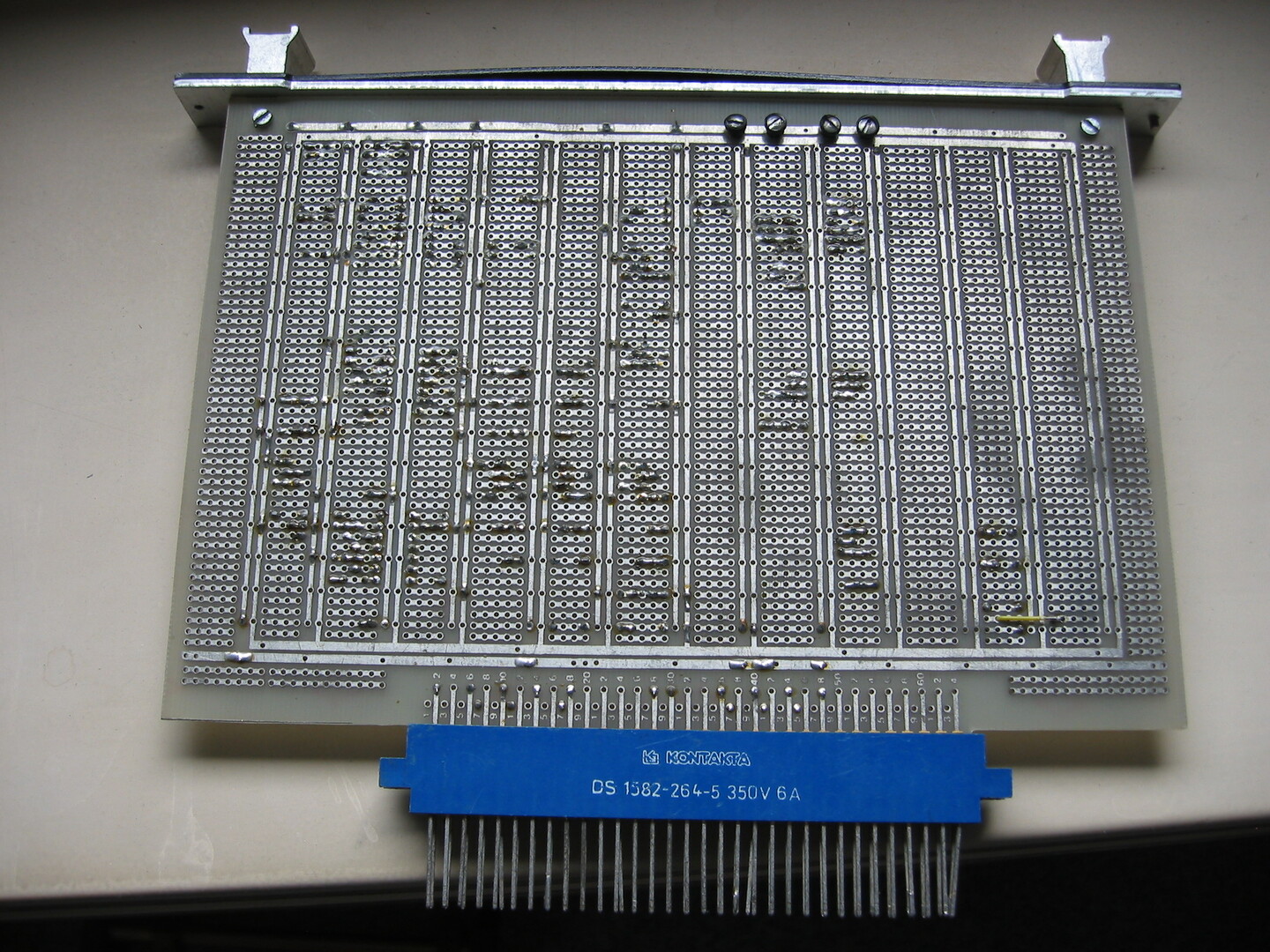
Rendezgetem a kacatokat ... Az egyik polcról előkerült néhány tartalék kártya egy retro VBKM/Transzvill EV-01 jelű PLC-hez. 1980-as évek.
Közöttük egy ilyen is, mint a fotókon. Ügy tűnik, hogy bár ez egy egy késztermékhez tartozott, a kis darabszám miatt, a kártya alapja valamilyen Próba/Proto NYÁK lap lehetett.
Laikusként is szépnek látom a kivitelezést, és külön előnyös, hogy a forrpontok kis szigetcsoportokat képeznek.
Lehet manapság ilyen rajzolatú Próba/Proto NYÁK lapocskát valahol venni?
Van néhány kisebb próba lapom, de azok csak egyszerű, egy furat - egy fóliapötty kialakításúak. A kocsi kínaiak is mind ilyeneket ajánlgatnak.
morvfer7 | 2496
2024-04-13 17:09:42
[24564]
nekem van egy barátom, aki naponta 70-80 csomagot ad fel és a rendelet úgy szól, hogy szerződést kell nekik kötni a postával és a webáruházukban kizárólag a szerződött összeget kérhetik el csomagonként.
az első gondolatom nekem is az volt, amit írtál, de akik kitalálták ezt, már látták előre, mit kell tenni.
ugyanez a barátom szállíttat a gls-el is, velük is szerződése van és a gls-nél már tudják, hogy ők vannak a célkeresztben, a posta le akarja ültetni őket.
gondolom a gls tulaj nem akarta eladni a céget, így megoldják másképp.
Az állórészt nem vizsgáltam. Viszont a számos javaslat közül kiválasztva a leggyorsabbat, és legegyszerűbbet: a szépen felcsiszolt kommutátor kapott néhány csepp kontaktsprét. A szikrázás nem nagyon változott, de mintha simábban, egyenletesebben járna.
Összeraktam, kíméletesen használom, amíg nem jelez (füst), hogy mégis a végét járja.
Előzmény: Karácsony Sándor, 2024-04-13 08:03:16 [24562]
Az összes webáruháznak a csomagkézbesítés menüpont alatt fel kell ajánlani a Magyar Királyi Posta szállítási szolgáltatását egy rendelet értelmében. Gondolom a TME-nek nincs kapacitása a postára szaladgálni minden egyes tétellel, inkább felfüggesztették egy időre az egyéni vásárláról kiszolgálását. A többi magyar illetőségű elektronikai cikkeket árusító boltnál is megjelenta Posta csomagszolgálata, de dupla áron, mint a többi futárszolgálat, így biztosítják, hogy eleget tettek a rendeletnek, és ha valaki mégis a postát választaná, akkor vastagon felszámítják a plusz ráfordított munkát, meg az időt...
A TME megint bekeményített? Gondolom megunták a sok át nem vett utánvételes csomagot.
nyiszi | 2350
2024-04-03 17:01:56
[24558]
Sziasztok, Keresek APC Smart-UPS DLA2200I -hez kapcsolási rajzot. Hátha lenne valakinek és megosztaná velem. Az SU2200i rajza teljesen más. Talán a SUA2200i jó lenne. Olyan hibát produkál, hogy terhelés ledek mind világítanak és utána a túlterhelés led is világít. A kimenetre semmi terhelés nincs csatlakoztatva. A tesztet rendesen végigcsinálja hiba nélkül. Ha az árammérő trafó kimenetét lezárom 20 Ohmos ellenállással akkor kialszanak a terhelés ledek. és rendesen működik. Terhelni is lehet, 1000W-al terheltem és akkuról is szépen megy. De így nem jelzi a terhelés mértékét. Az árammérő két kivezetése egy LF347 ic egyik műveleti erősítőjére megy.