Néha rakok fel kis saját egyéb munkát. Ez inkább olyan: ezt készítem a gépemmel... bejegyzés. Van egy saját fejlesztésű kamera tracker rendszerünk. Most készült egy érdekesebb demo. Hátha érdekel valakit.
Még egy kérdés: Hátha valaki tudna segíteni. Ha így elszúrok egy darabot, van arra mód, hogy az eloxot eltávolítsam és újra lehessen próbálkozni? Azt megfigyeltem, hogy ami már el van oxálva, azt egyáltalán nem fogja a festék.
KucseraP | 371
2024-09-20 15:22:52
[152]
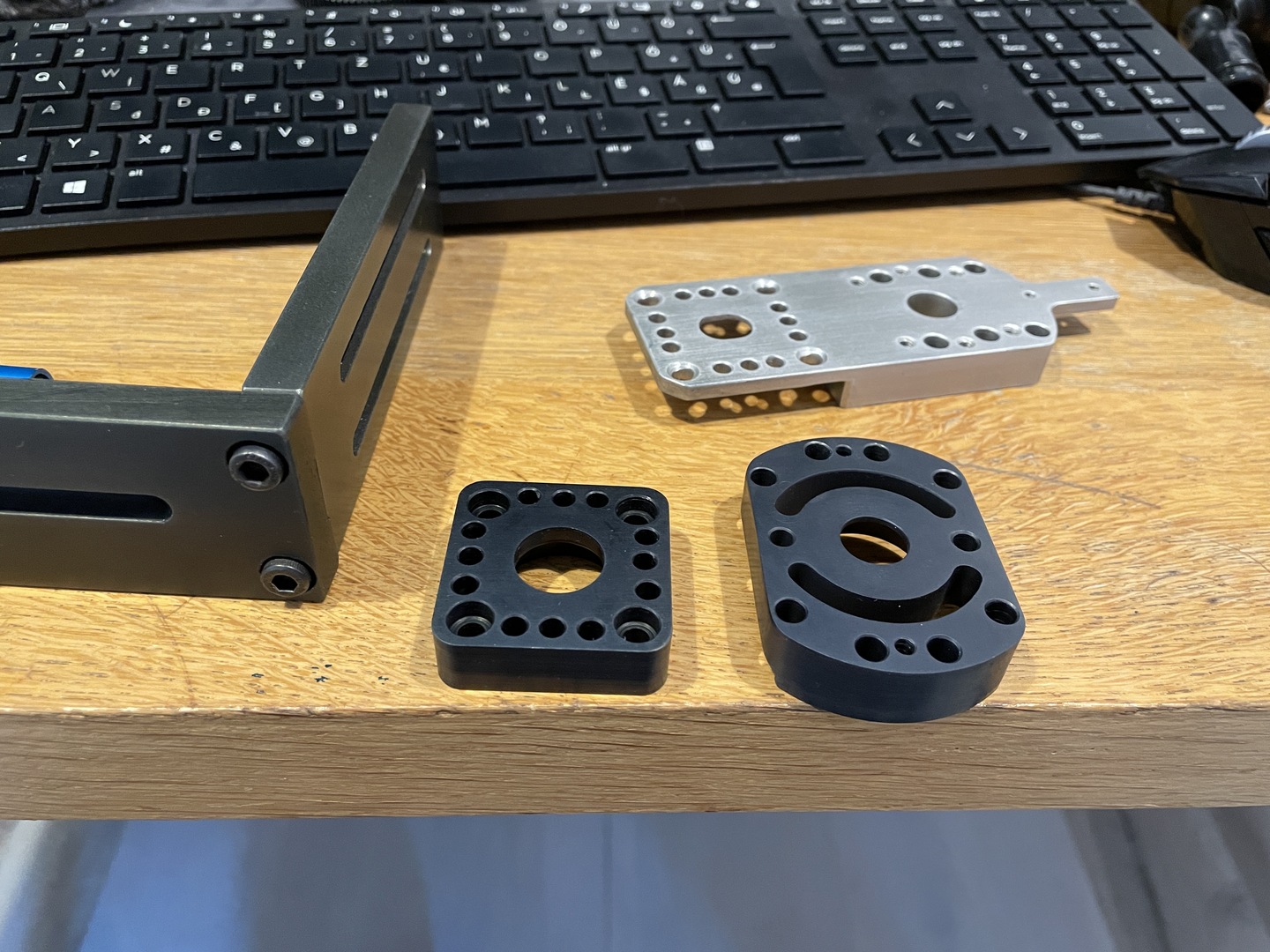
Felbátorodva a ma reggeli kísérleten nekiugrottam egy olyan darabnak, ami nem ártott volna, ha szépen sikerül. A kis fedél szinte tökéletes lett, viszont a nagyobb darab totál fakó, pedig a "technológiai paraméterek hasonlóak voltak. A nagyobbat dupla árammal csináltam hosszabban, mindent ugyan úgy csináltam...
Egy dologra tudok gondolni.. mire az utolsóhoz jutottam a sav eléggé bemelegedett. Elvileg 25 fok körül kellene lennie, ott már szerintem lehetett 35 is. Legközelebb megpróbálom hűteni a savat úgy, hogy belerakom az egészet egy nagyobb lábosba és felöntöm vízzel.
KucseraP | 371
2024-09-20 15:18:29
[151]
Még két kísérlet.
Rabb Ferenc | 4387
2024-09-20 13:21:14
[150]
Szerintem az egyik legjelentősebb változás az előzőekhez képest az eloxálás utáni alapos szárítás. Így a száraz, porózus felület jobban fel tudja venni a festéket.
Az utolsó vizes forralás fontos, mert az zárja le az pórusokat amikor az alumíniumoxid alumínium hidroxiddá alakul és megduzzad.
Étolajat lehetőleg ne használj mert később avasodik, penészedik, megromlik, büdös lesz. Javaslom inkább a parafin olajat.
Nagyon szépen köszönöm a sok segítséget. Lehetőségeimhez képest igyekszem megfogadni a tanácsokat. Itt a recept a következő volt: - 10 perc főzés trisóban (2 liter víz, 2 evőkanál trisó) - Vizes öblítés - Savas eloxálás (higítottam a savon 1liter akusav, 0.9dl desztvíz). 25 perc 6A - Áztatás szódabikarbónában (2 liter víz 1 evőkanál szódabikarbóna) - Áztatás tiszta vízben - HAJSZÁRÍTÓVAL MEGSZÁRÍT jó alaposan. Hőlégfúvóm nincs... lehet, hogy veszek egyet - Színezés 60fok, 15 perc, de szerintem egész hamar felveszi a színt. - Lecsöpögtet, megszárít (hajszárító), szoldídan gázlánggal melegít pár percig. - A biztonság kedvéért tiszta vízben forral 10 percet... itt már nem sok minden történt szerintem - étolajjal átdörzsöltem, hogy ne legyen olyan matt
KucseraP | 371
2024-09-20 11:14:25
[146]
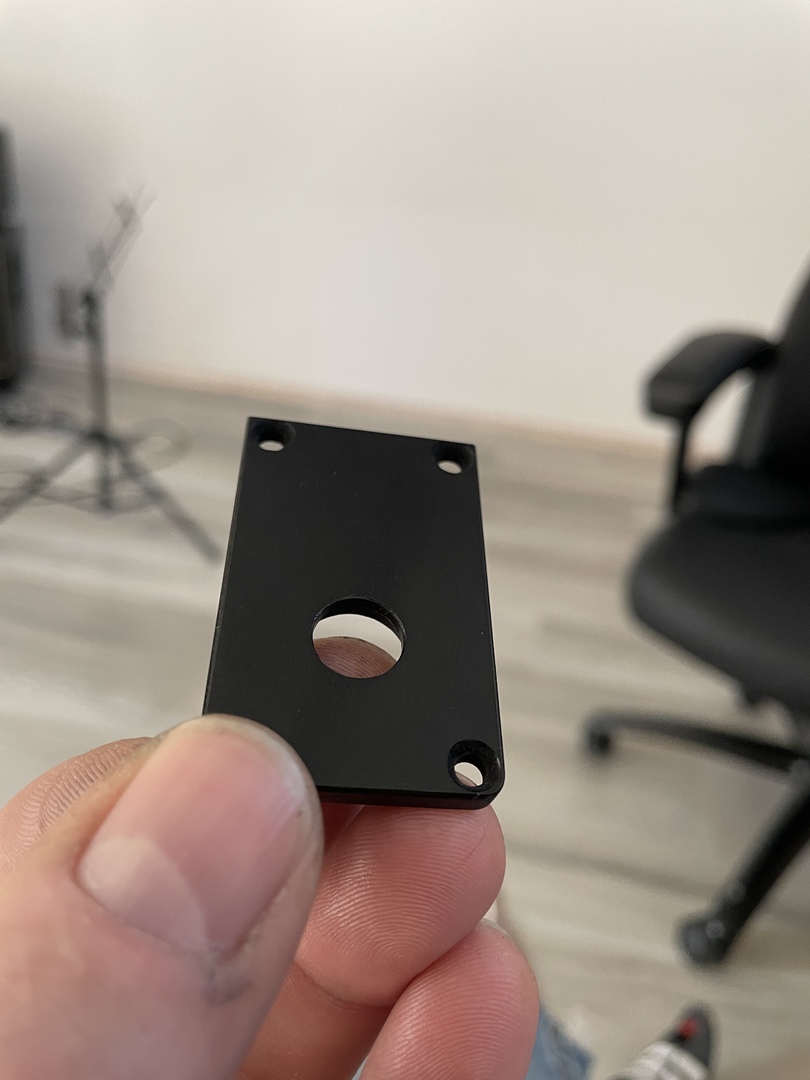
Megszületett az első valóban fekete darab
hostya | 3111
2024-09-19 21:07:11
[145]
Megint megpróbálok segíteni..
... harmadik edény: tiszta víz. Hagytam rendesen kiázni, meg lötyögettem a darabot, hogy tuti nem maradjon benne sav.
Eddig ok de anno huszonéve az akkori galvánüzem művezetője tanácsolta hogy: Az utolsó öblítés után a mdb-ot meg kell szárítani alaposan 100..120°C-ra hevíteni gázláng fölött (a gázlánggal óvatosan, mert ha a gázláng vége sárga akkor bekormozza a felületet..!)vagy hőlégfúvóval -mindezt a mdb érintése nélkül, a függesztéken tartva- majd az így megszárított darabot betenni a festék fürdőbe. Garantált az intenzív festés(szín) ha elegendő oxidréteg keletkezett az eloxálás során.
Magyarázat: Ha kiszárítod a felületet, sőt még a pórusokat is, -ezért kell a 100..120°C- Akkor a festék közvetlenül érintkezik, és bediffundál a pórusokba is.. Ha nedvesen teszed a festékbe akkor a pórusokban,+ felületen még víz van, tehát ott a festék "felhígul" utána már a több perces áztatás nem sokat javít a helyzeten.
A végén 10 perc forralás tiszta vízben.
Én ezt a műveletet ki szoktam hagyni..!
Festés után alapos öblítés,akár csapvízzel is majd újra szárítás ~100°C majd egy olajfürdő -tiszta híg olajban- Ez lesz a pórus zárás..
Utána bármilyen háztartási mosogatószerrel lemosom az olajat, vagy csak alaposan letörlöm egy ronggyal..
Én ezt a módszert alkalmazom már vagy 20 éve, nekem nagyon bevált..
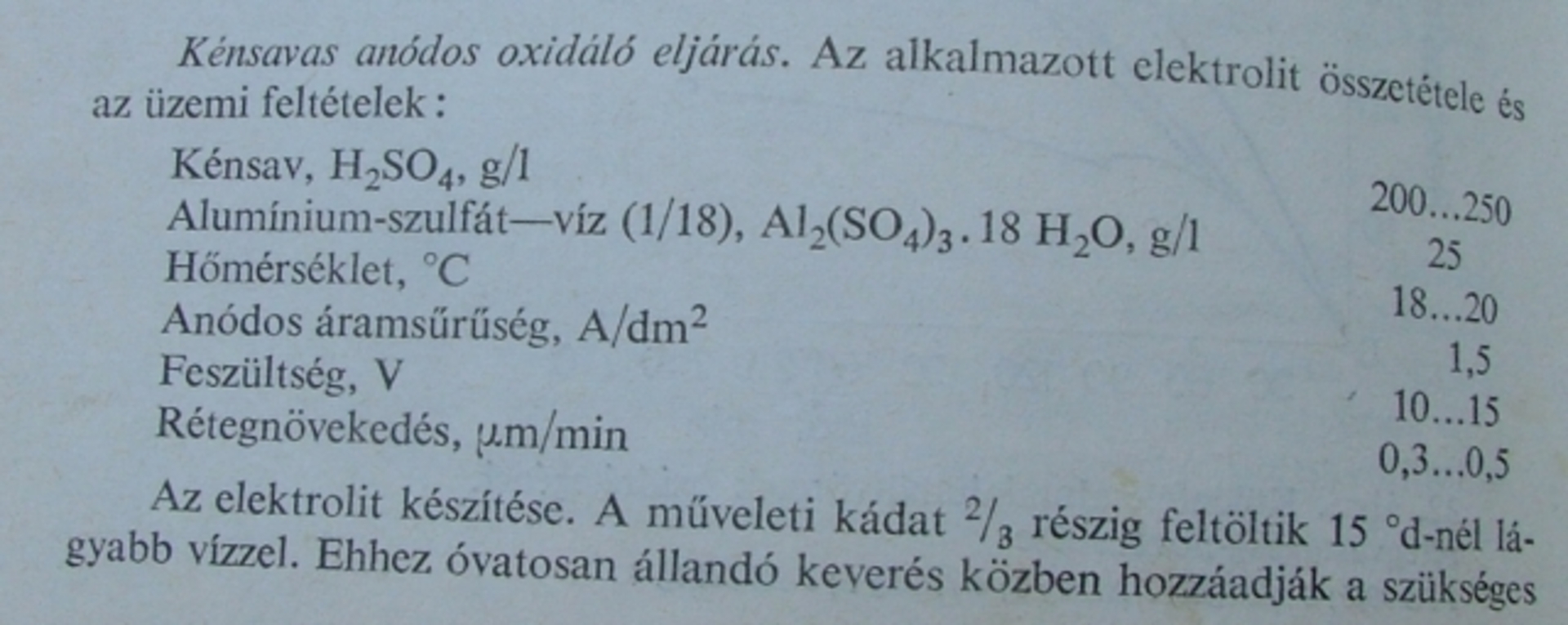
Még egy tanács a kereskedelmi akkusav az eloxáláshoz tömény.. hígítani kell. A tömény elektrolit intenzívebb oxidréteget eredményez,-időegység alatt- de azt is figyelembe kell venni hogy a töménysége miatt lassan visszamarja a keletkező oxidréteget..
Az eleje ugyanaz. 5 perc főzés trisóban, vízben öblítés. 20 perc elox 5A-es árammal akusavban. (magasabb áram / felület)
Amit most próbálgattam, hogy nagyon alaposan öblítettem savazás után. Volt három edény, az elsőben szódabikarbóna (2l víz, 1 evőkanál szódabikarbóna), második edény, sokkal hígabb szódabikarbóna oldat, harmadik edény: tiszta víz. Hagytam rendesen kiázni, meg lötyögettem a darabot, hogy tuti nem maradjon benne sav. A festék most szigorúan 50 fokos volt és 30 percig ázott benne, meg itt is kicsit lötyögtettem, kevergettem. A végén 10 perc forralás tiszta vízben.
Ami érdekes, hogy a két darabot most egyszerre csináltam, de van közöttük színeltérés... valószínű, hogy az áram nem egyenletesen oszlott el... legközelebb inkább több edényben, sorba kapcsolva a tápot próbálom meg az eloxot.
A következő kihívás, hogy tudjak kéz azonos színű darabot csinálni. A szín itt már nekem megfelelne!
Túl vagyok a második kísérletemen. HATALMAS KÖSZÖNET RABB FERENCNEK. Ez a kísérlet azzal a porral készült, amit Tőle kaptam Itt 30 percig eloxáltam 1,5A/dm2-el. A festék 50-60 fokos, festés után kiforraltam 10 percig. Nem lett fekete, de nagyon szép olyan pezsgőszínű lett. Nekem nagyon tetszik ez a szín. Próbáltam 0.8A/dm2-el, akkor pedig olyan acélszürke lett... Legközelebb nagyobb árammal is megpróbálkozok. Készítettem egy nagyon részletes videót. Abban szeretnék fejlődni, hogy a szín sötétebb legyen! Elvileg ez a por tudja a feketét is.
KucseraP | 371
2024-09-04 23:38:29
[134]
Fekete a cél:), de köszönöm a tippet. Lehet, hogy egyszer kell majd kék is.
Kétségtelen. De ha elég vastag az elox réteg (10-15 mikron) akkor már nem feltűnő. Csak az egymás mellé kerülő darabokat illik azonos minőségű anyagból készíteni, sütni-főzni-öblíteni.
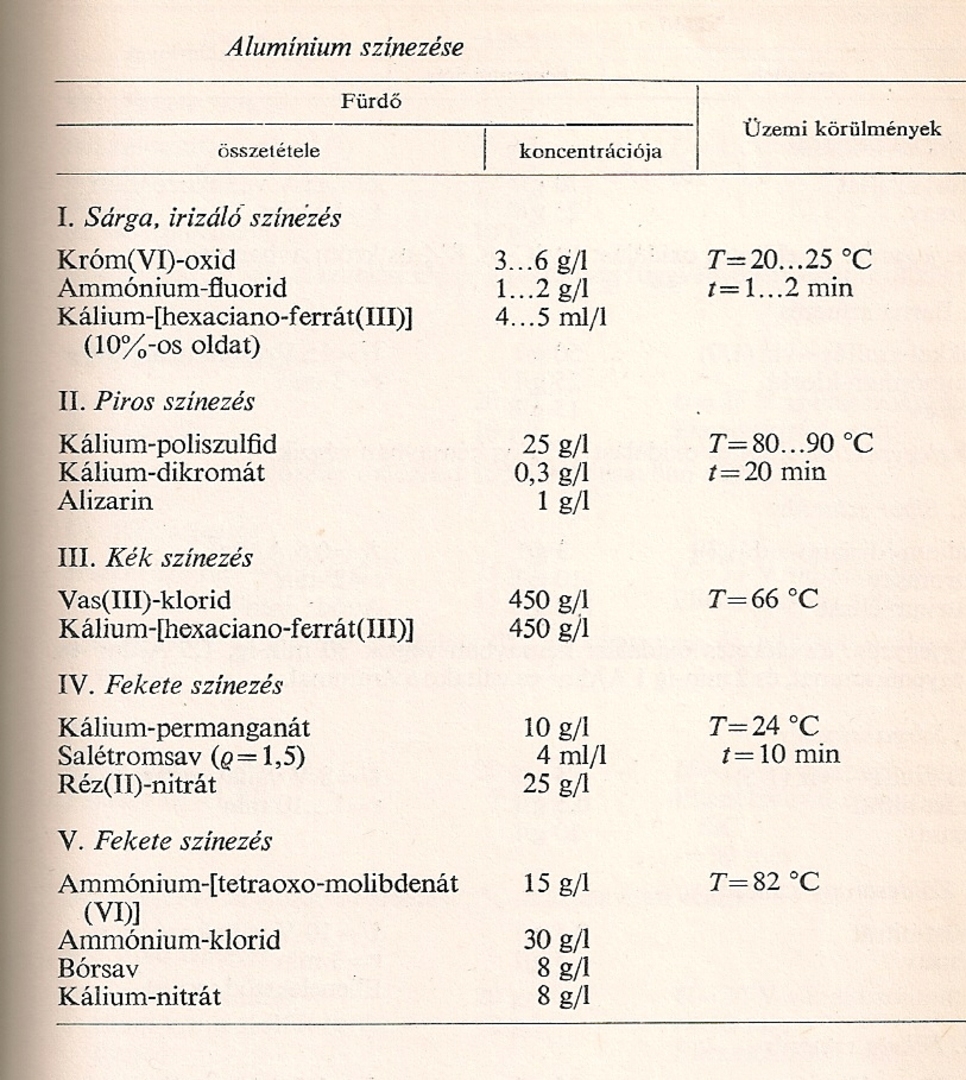
Tudjátok hogy a "FESTO" kék hogyan készül ? Alkalmam volt a gyakorlatban is kipróbálni . Nagyon szép laboreszközöket csináltunk anno a munkahelyemen . Eloxálas után a munkadarabot vaskloridban ( FeCl3) áztattuk . Utána a darab bekerült a sárga vérlúgsós ( kálium ferro cianid) oldatba. ahol a pórusokban kicsapódott a " berlinikék " anyag . Természetesen a főzéses póruszárást mindíg megcsináltuk Az anilinfestékek érzékenyek a nap UV sugaraira és fakulnak . A berlinikék az nem .
A ruhafesték addig volt jó eloxált alu színezésére, amíg anilin festéket tartalmazott. De azt a sötétzöldek kiutálták a technológiából
Feltúrtam a kincsesbányámat, és találtam neked kb 250g fekete port. Ezt valamikor 30+ éve az akkori munkahelyem galvánüzeméből kaptam. Ők ezzel színezték a hűtőbordákat, előlapokat stb. olyan feketék lettek, mint a tücsök... bokája.
Technológiai adatokat ne kérdezz, de néhány kisebb darabon kikísérletezhető. Az alapanyag megválasztásához hostya táblázata jó támpont.
A színezés után a darabot robogó forró vízben ki kell főzni. Ekkor a porózus felületű alumínium oxid alumínium hidroxiddá alakul és a pórusok bezáródnak. Aztán öblítés, szárítás.
Ha érdekel, küldj egy postacímet privátban és elküldöm
- A sav mennyisége kell, hogy igazodjon a darab méretéhez? Nem kell igazodni a darab méretéhez! Az elektrolit töménységét be kell állítani a kívánt értékre.. Ez kb úgy történik hogy a kereskedelemben kapható(volt) akkusavat fel kell hígítani.. 1L akkusavhoz 0.6..1dL (!) deszt/ioncserélt víz. Ha így beállítod az elektrolit töménységét akkor jó lesz.
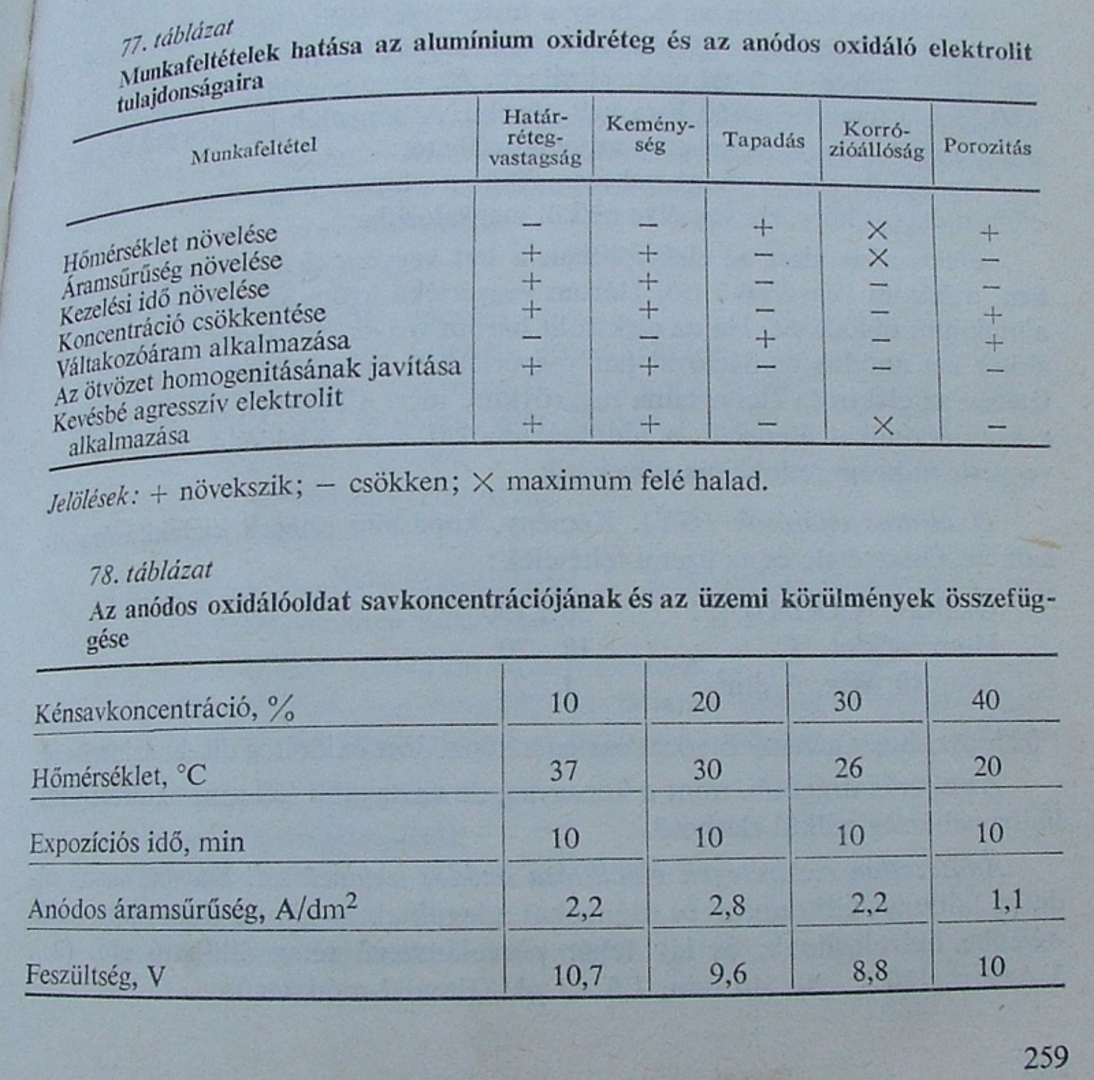
- Az elox áram és idő gondolom, hogy függ a felülettől,.. Igen! Az áramot a szakirodalom A/dm2 (Amper/négyzet deciméter)-ben határozza meg. (Kép) Ezt a legnehezebb betartani ha nincs változtatható feszültségű, és vagy áramkorlátos tápegységed, de hobby szinten nem is követelmény. Én egy fix 12V DC-s tápegységet használok. Megsaccolod a darab felületét, és megméred az áramot (A), ha nagyobb az áram, akkor kevesebb ideig kell az elektrolitban tartani. Ha kevesebb, akkor tovább..
FONTOS! A kádban/vödörben a negatív(-) pólushoz kapcsolt ALUlemez felülete mindig nagyobb legyen mint az eloxálandó darab felülete.! ============= A videóban van egy kisebb darab, az egész sötét lett, pedig csak 1.5A-el eloxáltam.
Igen, a kisebb darabnak kisebb a felülete, ezért időegység alatt vastagabb oxidréteg keletkezett rajta az adott áramsűrűség mellett.
A festés/színezés intenzitása nagyban függ az oxidréteg vastagságától. Ha vékony az oxidréteg akkor a fekete festék is csak lila/bordó lesz..
- A savat cserélni kell, vagy az nem károsodik? A savat/elektrolitot nem kell cserélni.
- A trisót kell cserélni? A trisót bele lehet önteni a wc-be? Kell hígítani előtte?
Válasszuk ketté a folyamatot. 1. Zsírtalanítás -itt lehet használni (konyhai)mosogatószert, hideg zsíroldót (Welldone), trisó de a műveletet mindig gumikesztyűben kell végezni.. -azért hogy ne maradjanak ujjnyomok a felületen- 2. Pácolás A pácolást NaOH oldatban kellene csinálni, de ha az nincs akkor a tömény trisó oldat is megteszi. A pácolást a zsírtalanítás után tömény trisó oldatban kell végezni legalább 10 percig, utána öblítés és mehet az elektrolitba.
A zsírtalanításhoz használt trisó oldatot nyugodtan kiöntheted. A pácoláshoz használt töményebb oldatot tedd el későbbre.. többször is felhasználható
Ruhafestékkel próbálkoztam, de nem tűnik ideálisnak... Jó az a ruhafesték amit használtál,(nem mindegyik jó) csak sokkal töményebb oldatot kell készíteni belőle.. pl. 1 tasak 2l vízhez.. helyett 3 tasak 2l vízhez.
Még egy fontos dolog az eloxáláshoz.! Az eloxálásnál nem elég ha csak egy függesztő "dróton" belógatjuk a mdb-ot az elektrolitba, -lehet úgy is de a drótot szorosan meg kell húzni fogóval- ui az eloxálás során a drót is eloxálódik, és az oxidréteg nem vezeti az áramot, és megszűnik az elektromos vezetés a drót és a mdb között.
Eloxálásaal kísérleteznek. Feketét akartam... kb lila lett. Kicsit foltos is. Lenne pár kérdésem, hátha van valakinek tapasztalata: - A sav mennyisége kell, hogy igazodjon a darab méretéhez? Van valami képlet, hogy pl: X liter/cm2? - Az elox áram és idő gondolom, hogy függ a felülettől, nincs erre valami egyszerű képlet? A videóban van egy kisebb darab, az egész sötét lett, pedig csak 1.5A-el eloxáltam. - A savat cserélni kell, vagy az nem károsodik? - A trisót kell cserélni? A trisót bele lehet önteni a wc-be? Kell hígítani előtte?
NEM TUD VALAKI VALAMI NORMÁLIS FESTÉKANYAGOT? Ruhafestékkel próbálkoztam, de nem tűnik ideálisnak...
KucseraP | 371
2024-08-03 16:30:22
[123]
Elnézést, nem vettem észre a kérdést, de a fórumtárs rendkívül szakszerűen megválaszolta! Köszönöm Neki:)
svejk | 33157
2024-07-21 15:23:15
[122]
Aha, tehát Shrek-nél a kék jöhetne szóba.:) Köszönöm a választ!
A zöld háttérhasználat, vagy más néven zöld háttér-effektus, a chroma keying elvén alapszik. Ennek lényege, hogy a kívánt elemeket előtérben lévő tárgyak előtt rögzítik egy egyszínű, általában zöld vagy kék hátteren, majd a felvett anyagot úgy manipulálják, hogy a háttértől eltérő színű részeket átlátszóvá változtassák. Ennek eredményeként lehetővé válik az előtérben lévő elemek elhelyezése különböző háttéren, illetve effektek hozzáadása a felvétel készítése után.
Azért érdemes zöld vagy kék hátteret használni ebben az eljárásban, mert ezek a színek általában nem fordulnak elő az emberi bőrön vagy a ruházaton, így könnyebben elkülöníthetőek a kívánt elemektől. Emellett a zöld és kék színek általában jellemzően nagyon távol esnek az emberi bőr és haj természetes színeitől is, így kevésbé valószínű, hogy a modellek ruházata vagy sminkje összemosódik a háttérrel. A zöld hátteret gyakran használják a televíziós és filmes stúdiókban, valamint a videókészítés területén effektek létrehozásához és virtuális háttér beállításához.
Fel szoktam rakosgatni ide a robot darus videókat is. Páran írták, hogy szívesen követik a berendezés fejlődését. Ez inkább az a dolog, amit a CNC-vel csinálok, nem maga a CNC.
KucseraP | 371
2024-05-31 15:15:52
[118]
Az A-tengelyem munkában. Kísérleti fogaskerék marás:
zsolt123 | 325
2024-05-26 15:37:09
[117]
jó dolgokat csinálsz, gratula
KucseraP | 371
2024-05-24 21:28:30
[116]
Rögzítettem egy prototípus készítésének lépéseit. A g-code-ot Fusion360-al generáltam. Rájöttem, hogy totál hülye voltam, hogy eddig más progikkal szenvedtem. Kb egy nap után nulláról megvolt a 3d modell, g-code minden, úgy, hogy előtte soha nem használtam Fusion 360-at. Iszonyat profi és egyszerű!!










 Itt 30 percig eloxáltam 1,5A/dm2-el. A festék 50-60 fokos, festés után kiforraltam 10 percig. Nem lett fekete, de nagyon szép olyan pezsgőszínű lett. Nekem nagyon tetszik ez a szín. Próbáltam 0.8A/dm2-el, akkor pedig olyan acélszürke lett... Legközelebb nagyobb árammal is megpróbálkozok. Készítettem egy nagyon részletes videót. Abban szeretnék fejlődni, hogy a szín sötétebb legyen! Elvileg ez a por tudja a feketét is.
Itt 30 percig eloxáltam 1,5A/dm2-el. A festék 50-60 fokos, festés után kiforraltam 10 percig. Nem lett fekete, de nagyon szép olyan pezsgőszínű lett. Nekem nagyon tetszik ez a szín. Próbáltam 0.8A/dm2-el, akkor pedig olyan acélszürke lett... Legközelebb nagyobb árammal is megpróbálkozok. Készítettem egy nagyon részletes videót. Abban szeretnék fejlődni, hogy a szín sötétebb legyen! Elvileg ez a por tudja a feketét is.