Az ebay-en böngészve rábukkantam egy cuccra, amiről nem is tudtam, hogy ilyen egyáltalán létezik. Ez a Simotion D410-2! Ez egy többtengelyes vezérlő, amit áll egy szabadon programozható számítóegységből, egy integrált Sinamics szervóvezérlőből és egy Profibus és Profinet csatolóból, amin keresztül további tengelyekkel bővíthető!! Sok-sok tengellyel. A simotiont ismertem, de nem tudtam, hogy van belőle ilyen kicsi is, ennek az ára sem olyan horror és jó, hogy egyből bele van integrálva egy tengely. Ha valakit érdekel az a viszonyalg hosszú procedúra, amivel egy ilyen eszköz beüzemelhető, szívesen leírom, de ez egy olyan speckó terület, hogy nem biztos, hogy bárki elolvasná...
A robotom agya tehát ez a Simotion D lett. Ahol ezzel most tartok. A két szervóhajtás beüzemelve. Nincs hibakód, Profineten kommunikál a Simotion és a Sinamic. A simotion-ben be van kondigurálva két axes és tudom küldözgetni őket különböző pozíciókra. AZAZ: mozog a robotkar!!!!
KucseraP | 311
2019-05-18 21:48:55
[13]
Jaaa, most egy kicsit a mechanikára koncentráltam, elfelejtettem elmesélni egy fontos mozzanatot a vezérlővel kapcsolatban!!!
KucseraP | 311
2019-05-18 21:47:01
[12]
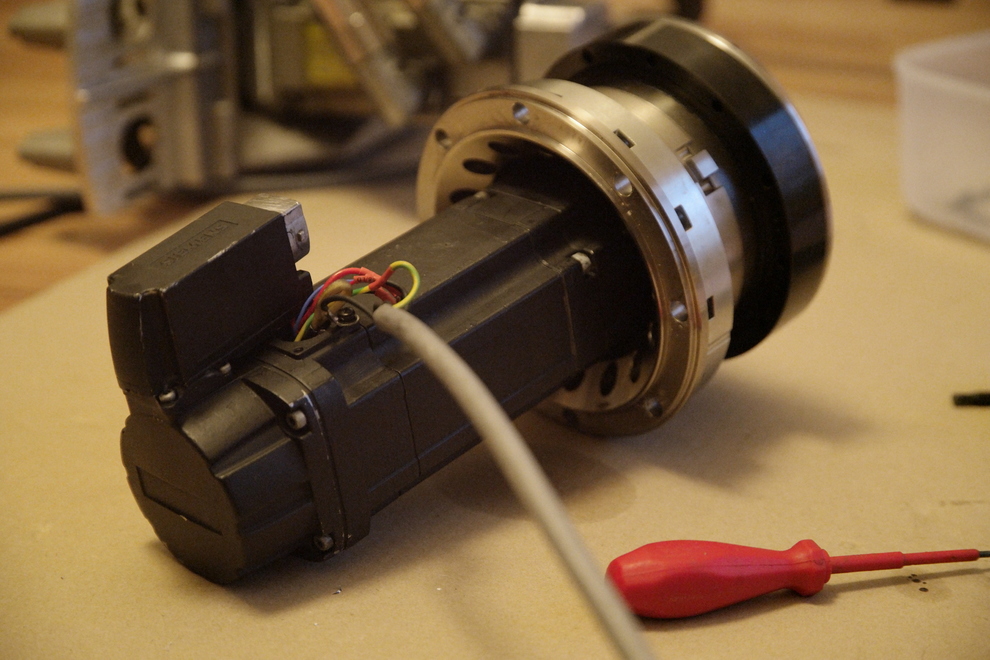
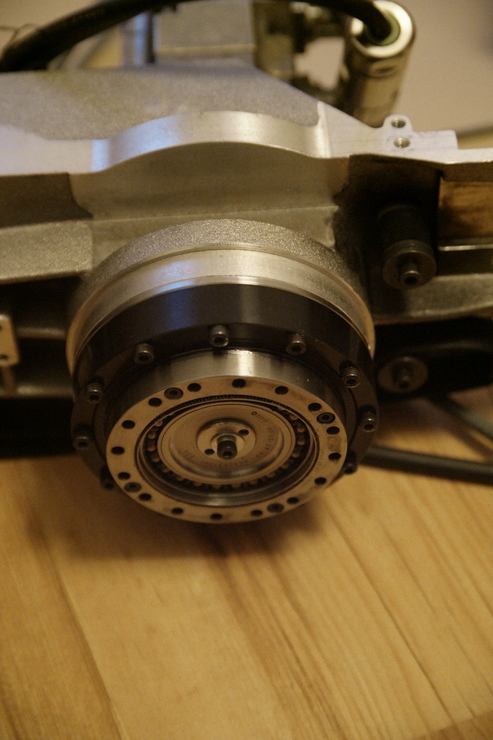
És most itt tartok: Robot összeszerelve, motorok forognak, semmi nem szorul:
KucseraP | 311
2019-05-18 21:45:05
[11]
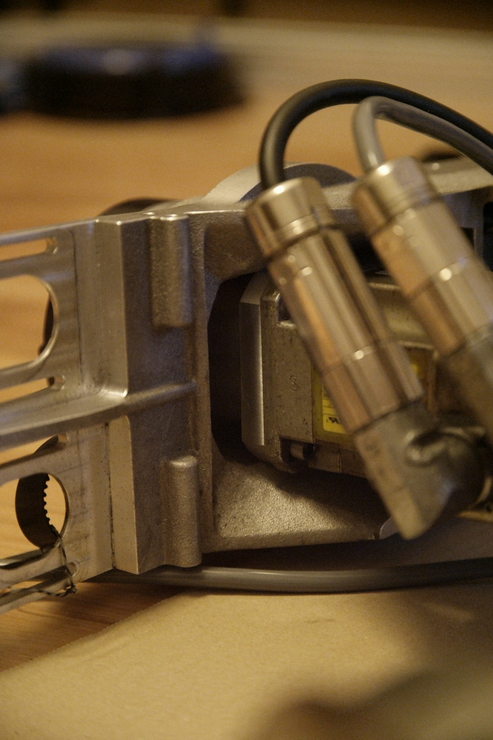
A siemens motoron a csatik eléggé kilógnak, úgyhogy a robot talpából is marni kellett. Ez sem volt kis meccs.. épphogy befér a marógépem alá a kb 25kg-os kis alu masszívum. Egész izomlázam lett, mire kitekergettem belőle azt a kb fél kiló alut.
TROMF22 | 1355
2019-05-18 21:43:43
[10]
No ez lett volna a következő kérdésem, hogy mit is fog majd ez a robot csinálni, ha nagy küzdelmek árán ismét életre kel.
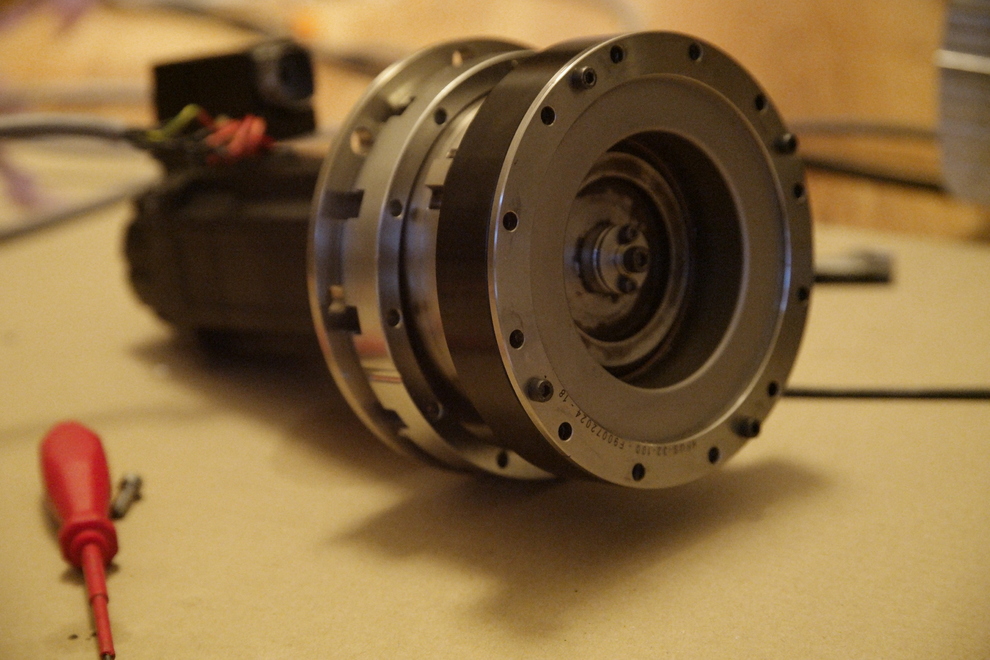
És pár kép a nagy hullámhajtóműről. Én csak úgy hívom, hogy: The Brute! A motor 2Nm-es és rá van pakolva egy 1:100-as lassító áttétel. Nagyon masszív darab!
KucseraP | 311
2019-05-18 21:38:52
[8]
Örülök, hogy tetszik a videó. Ez a robot is kamerát mozgat majd. Ha ránézel a youtube csatornámra van ott még sok robotos, zenés érdekesség. Nekem ez a specialitásom, hogy robottal mozgatok kamerát
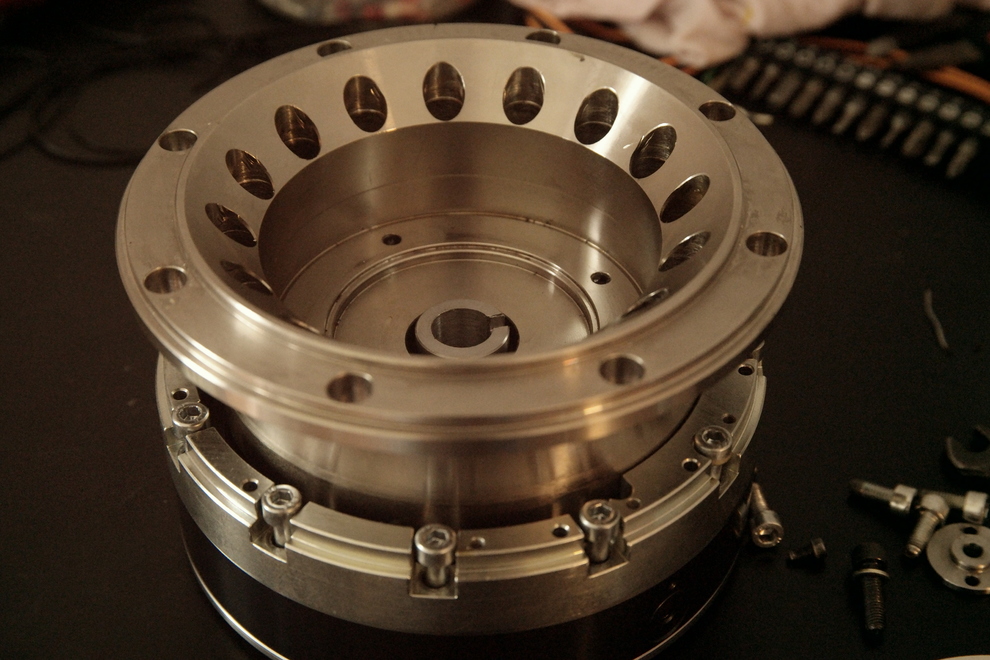
Nem vagyok esztergályos, egy fogásból kell ilyet esztergálni, úgy döntöttem, hogy a nagyobb hullámhajtóműnél megpróbálom felfúrni a hullámhajtóművet (ahogy felfúrtam eltűnt a csap bemarás, ezt ütülag egy oldalhoronnyal pótoltam... nem vagyok büszke erre a műszaki megoldásra, de a szerszámaimmal ezt tudtam összehozni. Utólag elmondták, hogy kell csaphornyot csinálni. Majd legközelebb...). Ez rendben is volt, elég precízen sikerült, itt is kellett esztergálni egy távtartót. Erről is pár kép:
TROMF22 | 1355
2019-05-18 21:29:26
[6]
Nagyon sajnálom, de amit a robottal kapcsolatban írsz, az számomra - egy obsitos gépésznek - majdnem kínai.
De ez a videó piszok jó! Hogy az ördögben lehet (csak) 1102 a nézettsége? Mivé lett a világ...
Nagyon sok fajta szinesfém alapanyaguk van és szó nélkül vágnak tetszüleges darabot. Nekem egy 90mm es átmérőjű rúdból vágtak egy 90mm-es pogácsát.
Aztán kaptam még egy tippet. A gödöllői vastelepen voltak tömegével ilyen pogácsák, a képen is egy ott vett darab látható, itt 800Ft/kg árom lehetett Alut venni. Be is vásároltam mindenféle méretből...
KucseraP | 311
2019-05-18 21:17:40
[3]
És csináltam egy szép távtartót:
KucseraP | 311
2019-05-18 21:16:01
[2]
Apránként írom a fejleményeket tovább. Feladtam tehát, hogy az eredeti motorokat használjam, viszont volt egy teljesítményben, méretben kb. passzoló motorom (sőtt kettő, mert egyből két motort vettem, így akciósabb volt:) A probléma az volt, hogy az eredeti motor tengelye 11mm átmérőjű (francia szabvány... gondolom:) a siemens motor tengelye 14mm átmérőjű. A motor tengelyt leesztergálni macerás, mert teljesen szét kell szedni a motort (nem lehetetlen, de macerás, főleg az encoder miatt). A hullámhajtóművet felfúrni megintcsak nem egyszerű, nem nagyon volt benne annyi hús, meg azt is szét kellett volna totál szedni. Az egész motor úgy van egyébként szerelve, hogy a motor leszedéshez kb atomjaira szét kell szedni a robotot. Ez se tetszett, mert tudtam, hogy cserélgetni, variálni fogom a motorokat. Egy kuplungos tengelykapcsolat mellett düntöttem. Belekapaszkodtam tehát NASA technológiás esztergámba és marógépembe melyekről korábban készült egy művészi videó, itt megtekinthető:
KucseraP | 311
2019-05-18 19:37:10
[1]
Üdvözlök Mindenkit,
Egy staubli robot felélesztésébe kezdtem. Ennek történéseit szeretném veletek megosztani. A robotot a fórumon vásároltam, sajnos (vagy szerencsére:) a vezérlése már nem jutott el hozzám, csak a kar. Egyenlőre ott tartok, hogy két tengelyem már mozog, remélhetőleg lesz a dologból valami, gondoltam, hogy megosztanám tapasztalataimat a fórumtagokka.
Pár szó az eredeti robotról: A robot egy SCARA felépítésű kar, ami 3 rotációs és egy lineáris tengelyből áll. A két nagyobb csuklón hullámhajtóművek vannak. 4 AC szervó mozgatja a csukókat, a szervókon nagypontosságú abszolut forgásjeladók dolgoznak. A jeladók jeleit egy FPGA dolgozzta fel, még a roboton, majd egy optikai kábelen továbbította a vezérlő felé (ami nekem nincs..). A motorok pontos adatai a neten nem fellelhetőek, a jeladó is eléggés specifikus.
1. gondolat Valahogy meg kellene menteni az eredeti motorokat és csak vezérlést faragni a robothoz. A roboton Heidenhain EQi1128 jelű encoderek vannak, melyek EnDat21 interface-el rendelkeznek. A fórumon segítséget kérve, megtudtam, hogy a Kollmorgen szervóvezérlők fogadnak EnDat encoder jeleket… Elég drágák az ilyen vezérlők, és nem értek a kollmorgenhez. Siemens PLC programozóként, oktatóként dolgozok, úgy döntöttem, hogy ha már okosodok Siemens-ból okosodjak. Meg nem akartam ezer éves elavult cuccokkal se dolgozni, ha tanulok valamit, az legyen naprakész.
2. gondolat A siemensnek lézezik egy SMC20 elnevezésű szenzor modulja ami az adatlap szerint fogad EnDat jelet és konvertálja azt Drive-Cliq-jellé, amit már fogadnak a Siemens sezrvó vezérlők, úgyhogy irány az Ebay, veszek egy SMC20-at. Sikerült egy ilyen modult kábé egy huszasért beszereznem, meg vettem egy S110 et (szintén a fórumról) és kezdődhetett az első kísérlet. S110 el már dolgoztam korábban, bár nem vagyok nagy szervós. Ha siemens morot kell S110-re kötni a vezérlő kb. mindent kiolvas a motorból és viszonylag egyszerű a konfiguráció is. Na milyen lesz ez egy idegen motorral…:) hát volt egy olyan érzésem, hogy nagy szívás!!
3. Az első kísérlet A enkóder bekötésének visszafejtése nem volt vészes. A panel alapján kitököltem a tápbekötést GND, +5V, ezen kívül egy CLOCK és /CLOCK, és egy DATA és /DATA bekötése volt szükséges (6 vezeték). Az EnDat egy kétirányú digitális interface a szervó és a jeladó között. A Heidenhain gyári kábellel volt bekötve a jeladó, a színkodok kb. következetesek, úgyhogy be lett kötve a jeladó (utólag kiderült, hogy jól sikerült a dolog). Az S110 és az SMC20 között egy ethernet szerű (Drive-Cliq) elnevezésű jelátvitel van. Ez Siemens specifikus. Minden összekötöttem és bekapcs! Az S110 egy moduláris szervórendszer, mely áll egy Power Modulból (teljesítmény rész) és egy Control Unitból (CU). Az én CU-m egy CU305-PN volt ( egy újjabb busz: PROFINET- amivel a szervó vezérlőre fűzhető.. de ez majd később:) A CU-n egy stabil piros RDY lad világított folyamatosan, se kép se hang, se kommunikáció. Felnyaláboltam az egész cuccot és bevittem a siemenshez a szakértő kollégákhoz. Kiderült, hogy a CU valószínűleg halott, nem tölti be a firmware-t. A firmware frissítéshez egy speckó SD kártya kell, ami szerencsére volt bennt, kaptam egyet kölcsön, rányomtam egy firmware frissítést, aminek hatására más piros lámpák kezdek folyamatosan világítani, de a CU még mindig halott volt… itt megállt a tudomány (még egy tippem van, ismerek pár srácot a system testnél, akik ismerik azokat a srácokat, akik ezt fejlesztették, hátha mondanak valami okosat, de ez se holnap lesz…)… na jó, tehát a CU halott. Kaptam egyet kölcsön, azzal tudok játszani.
4. Végre az első kísérlet Az S110 nem eszi meg az idegen EnDat jelet… Az első probléma az volt, hogy a szenzor modul tápellátási hibát dob. Ez azért volt, mert a szenzorra kiad a modul tápellátást (5V) és két vezetéken ezt visszaolvassa.. na ezt átvertük egy sima kis visszakötéssel csatlakozón belül. Egy hiba megszűnt! A motor hőmérő hibát elég egyszerű kiütni… ez rutinból megy. Már látom a forgásjeladó jelét az S110-et monitorozva, de folyamatos inkrementális jeladó hibát dob, hogy valami impulzusok nem jönnek… hosszas googlizás. Úgy tűnik, hogy mindenki Simens motort köt Siemens szervóra… hol itt a sport… kb. semmi infó. 5. Váratlan motorhirdetés a fórumon:) Épp feldobtak egy ENDat-os abszolut jeladós siemens motort a fórumra eladásra! Nem volt olcsó, de megérte:) Megvettem. A szokásos csípőfogóval bontott konstrukció. Kiváncsi voltam, hogy azzal vajon menne e az EnDat SMC20 elképzelés. Megjött a motor, egy nap szutakolás! Na akkor kössünk be egy Siemens motort. A siemens-nek nagyon korrekt adatlapjai vannak, megvan a gyári kábel bekötés a motor és a szenzormodul között. Ami máris fura volt, hogy nem 6, hanem 14 eret kell bekötni… ez már gyanús. Az encoder szintén Heidenhain, de az Endat01 felirat díszeleg rajta. Na nem csigázom tovább az olvasókat. Úgy tűnik, hogy a siemens Endat elképzelésébe benne van az, hogy az encoder a digitális kommunikáció mellett elküld egy 1Vpp resolver jelet… A heidenhein szerint: EnDat01-inkrementális jellel van, EnDat21-inkrementális jel nélkül… Az SMC20 oldalán és az adatlapjában ott díszeleg, hogy EnDat21-et fogad (konkrétan rá van szitázva…), de ezek szerint kell neki az inkrementális jel… legalábbis nem sikerült kiütnöm a hibát, amit a szervó dob, a motort az eredeti encoderrel nem tudtam megforgatni.