|
Előzmény: Lpeti11, 2022-10-06 08:48:27 [6508]
|
|
Előzmény: Karácsony Sándor, 2022-10-05 12:35:06 [6507]
|
|
Előzmény: Lpeti11, 2022-10-04 18:30:39 [6506]
|
|
Előzmény: Virbo, 2022-05-17 11:22:42 [6503]
|
|
Előzmény: Virbo, 2022-05-17 11:22:42 [6503]
|
|
Előzmény: szf, 2021-12-19 12:31:07 [6500]
|
|
Előzmény: szf, 2021-12-19 12:31:07 [6500]
|
|
Előzmény: D.Laci, 2021-12-19 12:04:08 [6498]
|
|
Előzmény: TBS-TEAM, 2021-12-19 11:57:05 [6497]
|
|
Előzmény: szf, 2021-12-19 11:47:47 [6496]
|
|
Előzmény: szf, 2021-12-19 11:47:47 [6496]
|
|
Előzmény: TBS-TEAM, 2021-12-19 11:43:25 [6495]
|
|
Előzmény: szf, 2021-12-19 11:27:13 [6494]
|
|
Előzmény: dtb, 2021-11-20 19:56:20 [6492]
|
|
Előzmény: Tari Gábor, 2021-11-20 19:39:04 [6490]
|
|
Előzmény: Tari Gábor, 2021-11-20 19:39:04 [6490]
|
|
Előzmény: pistix, 2021-08-29 19:19:19 [6488]
|
|
Előzmény: frob, 2021-08-26 07:05:31 [6485]
|
|
Előzmény: frob, 2021-08-26 07:05:31 [6485]
|
|
Előzmény: D.Laci, 2021-08-25 11:56:18 [6481]
|
|
Előzmény: dtb, 2021-08-25 07:56:17 [6479]
|
|
Előzmény: D.Laci, 2021-08-25 11:56:18 [6481]
|
|
Előzmény: designr, 2021-08-25 08:30:21 [6480]
|
|
Előzmény: dtb, 2021-08-25 07:56:17 [6479]
|
|
Előzmény: TBS-TEAM, 2021-08-24 22:23:19 [6478]
|
|
Előzmény: dtb, 2021-08-24 21:13:48 [6476]
|
|
Előzmény: dezsoe, 2021-08-24 16:41:20 [6474]
|
|
Előzmény: TBS-TEAM, 2021-08-24 14:27:56 [6473]
|
|
Előzmény: frob, 2021-08-24 13:12:29 [6472]
|
|
Előzmény: TBS-TEAM, 2021-08-24 14:27:56 [6473]
|
|
Előzmény: frob, 2021-08-24 13:12:29 [6472]
|
|
Előzmény: TBS-TEAM, 2021-08-24 09:07:14 [6470]
|
|
Előzmény: frob, 2021-08-24 07:14:22 [6468]
|
|
Előzmény: frob, 2021-08-23 19:37:59 [6466]
|
|
Előzmény: frob, 2021-08-24 07:14:22 [6468]
|
|
Előzmény: tóthz, 2021-08-23 19:47:20 [6467]
|
|
Előzmény: frob, 2021-08-23 19:37:59 [6466]
|
|
Előzmény: svejk, 2021-02-21 13:02:02 [6461]
|
|
Előzmény: Törölt felhasználó, 2021-02-21 13:32:56 [6462]
|
|
Előzmény: svejk, 2021-02-21 13:02:02 [6461]
|
|
Előzmény: dtb, 2021-02-20 15:02:33 [6454]
|
|
Előzmény: dtb, 2021-02-20 19:23:27 [6459]
|
|
▲
◊
|







 +20...48V-ig.
+20...48V-ig.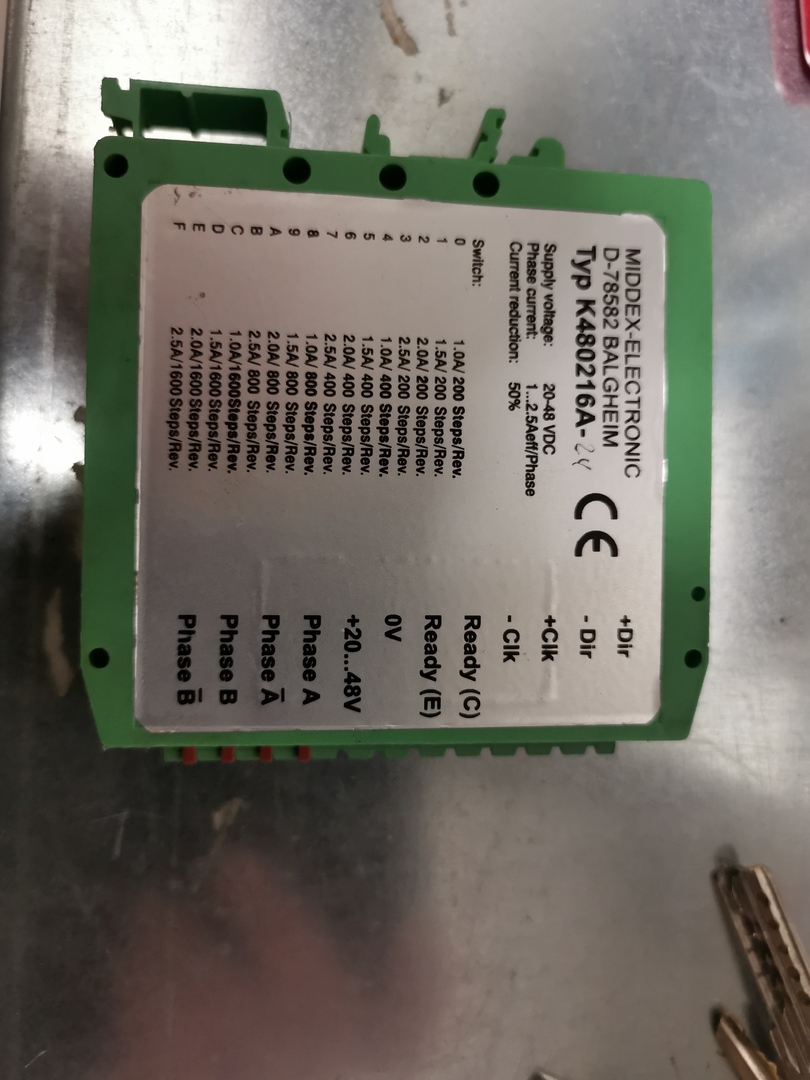






 j
j