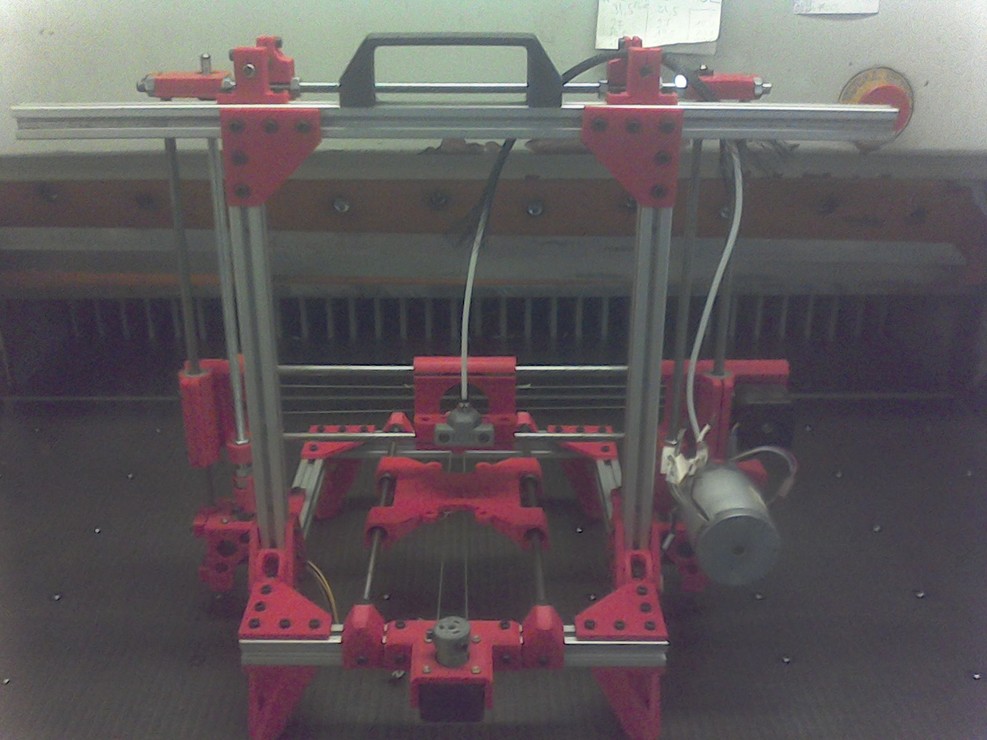
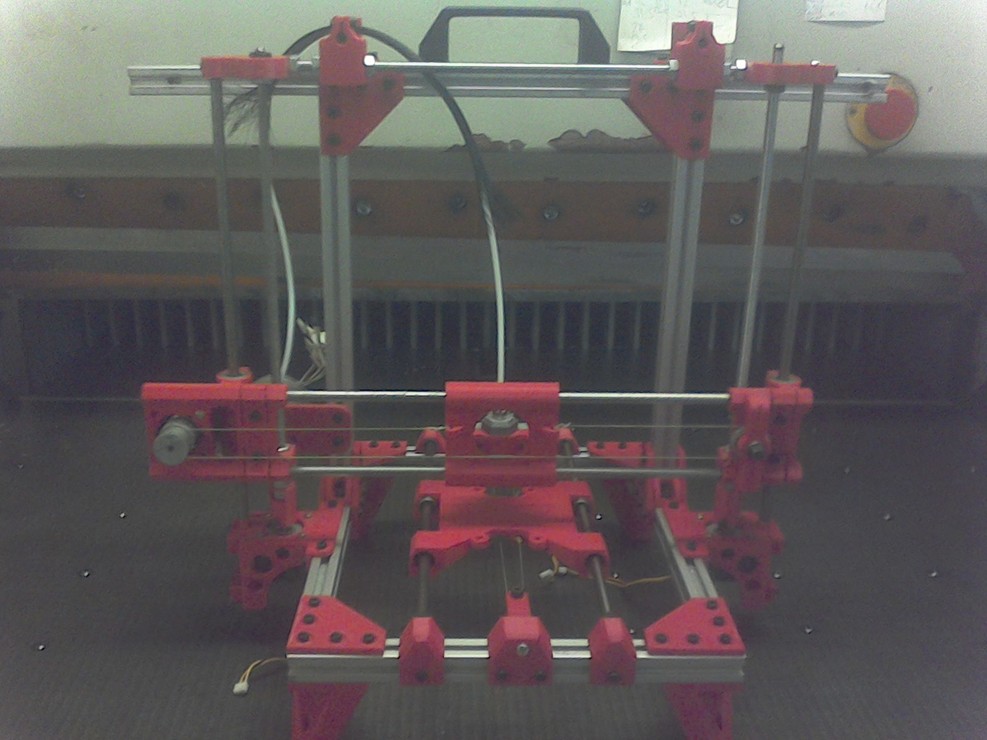
Van egy 3D nyomtató vázam motorokkal, eladó! (elektronika, fűthető asztal és fej nem jár hozzá!) Kicsi fiam gépe volt, de nagyobbat építettünk ezt meg rakosgatjuk jobbra-balra.
Igen, nekem is inkább olyan "pick-and-place" pakolórobot felhasználásra tűnik alkalmasabbnak. A pontosság akár meg is van, de nincsenek visszaható erők.
Szerintem a delta mechanika is onnan jött a 3D nyomtatós világba.
Ez csak részlet kérdés! A lényeg a mechanika! Mint írtuk a sebesség hatására elkezd deformálódni. Bár régi OROSZ mechanikai megoldással ez biztos mérsékelhető lenne! :D :D :D (csak fehér ember nem emelné fel! + PAKS 2 kellene az üzemeltetéséhez!)
De ez nem azt jelenti hogy nem használható a dolog! Csak olyan helyeken ahol a sebesség a fontos nem a pontosság!
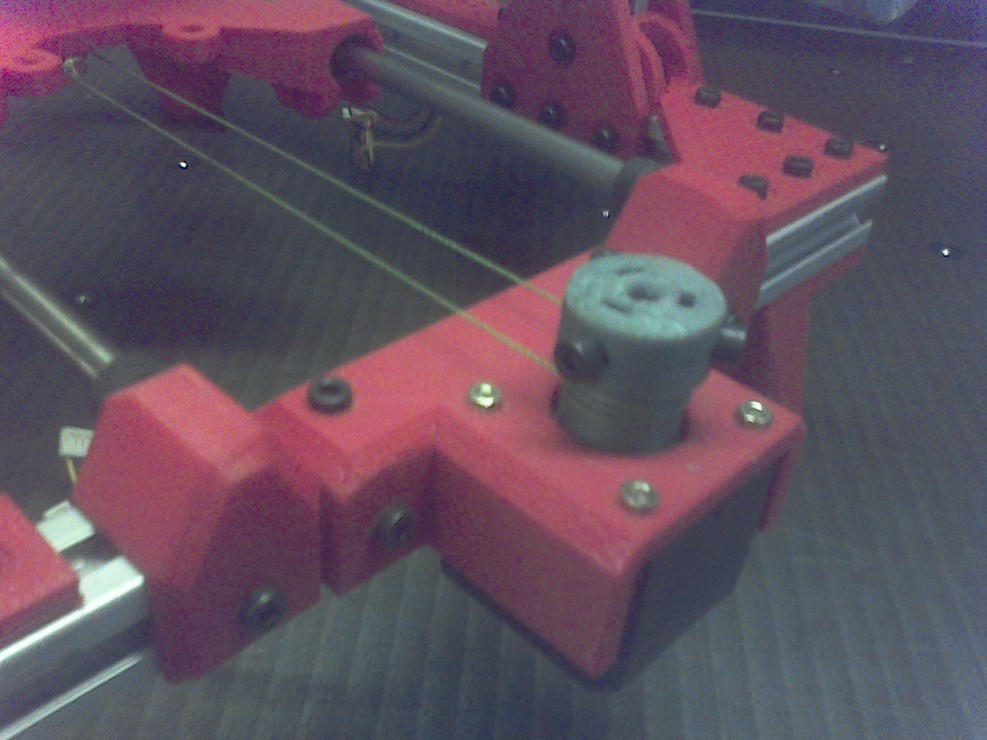
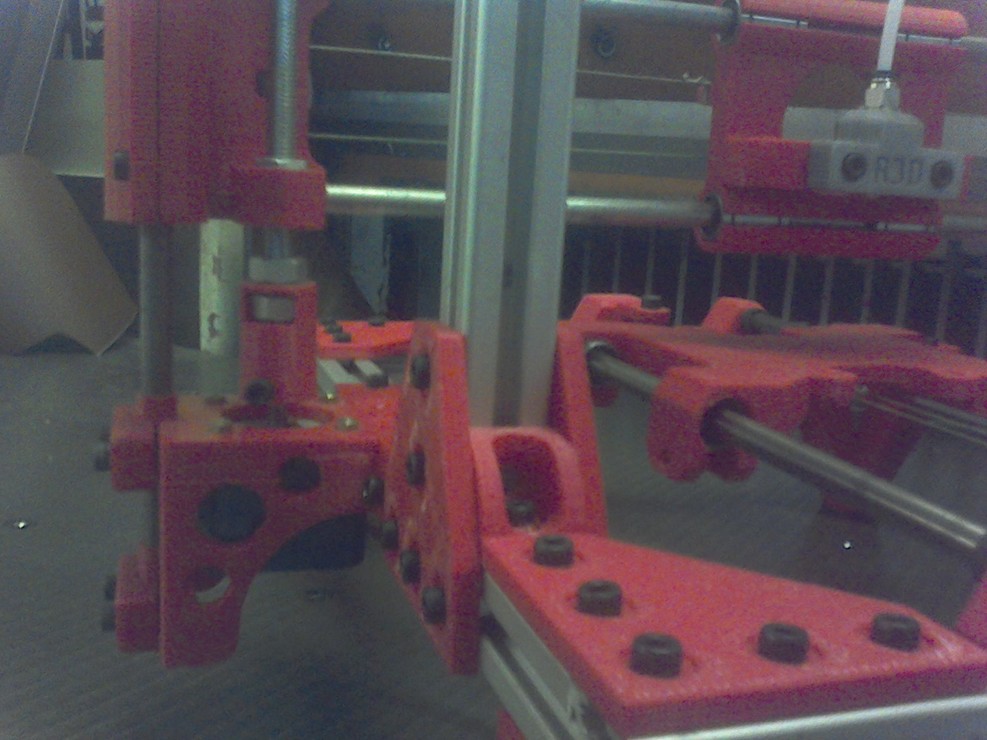
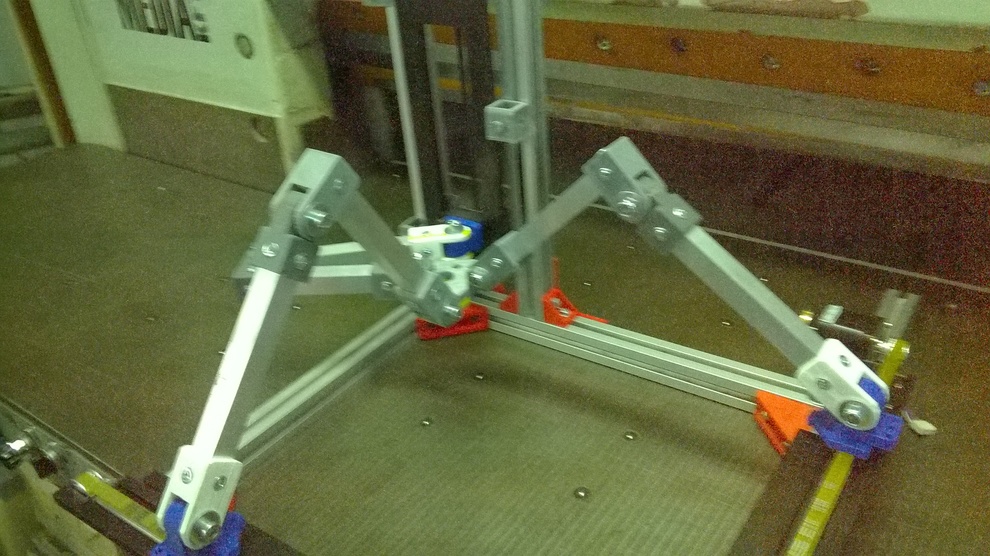
Ha már csukló a mechanikában,remélem nem haragszik a topic gazda teszek fel egy képet. Van egy ilyen H alakú mechanikám,érdekessége hogy a két oldali hajtás külön külön szervó motorokkal volt meghajtva,a híd pedig a két oldalán egy-egy 12mm körüli csuklóval. Nagyon preciz kivitelezés..ipari technika..THK sinek,golyós orsó. A csuklók csúszó jellegűek..két perselyben forog a tengely..igaz a perselyek nem érnek végig csak kb 30mm-re. Ami érdekesség még a híd egyik végén 2 csuklópont van..igy egy z közdarabbal ki tud küszöbölni akár pár mm-es beállitási pontatlanságot. Vagy pedig azt a célt szolgálja hogy ha mégis elmászik a szinkronból a két oldal..ne feszüljön be. Ezt támasztja alá hogy a hid egyik végén van egy kis induktiv érzékelő..ha elfordul a híd..akkor nyit..gondolom letiltotta a hajtást. Szerintem ha megcsinálom lehet lefixálom a csuklót..bár mint mondtam rendesen el van készítve.Inkább a rezonanciától tartok. Lásd iparban is használnak ilyet,eddig én sem találkoztam vele.
ANTAL GÁBOR | 4685
2018-01-05 06:59:59
[143]
A linkelt videón lineáris motorok hajtanak attól a bitang gyorsaság
PallMallMan | 447
2018-01-04 23:02:28
[142]
Igazad is van meg nem is! Csapágyak számát tekintve az egész szerkezet 21 csapágyat tartalmaz a lineáris csapágyakkal együtt. Szerintem egy hagyományos értelembe vet XYZ is tartalmaz ennyit.
Az ismétlési pontossággal sincs gond, amíg a motor nem veszt lépést.
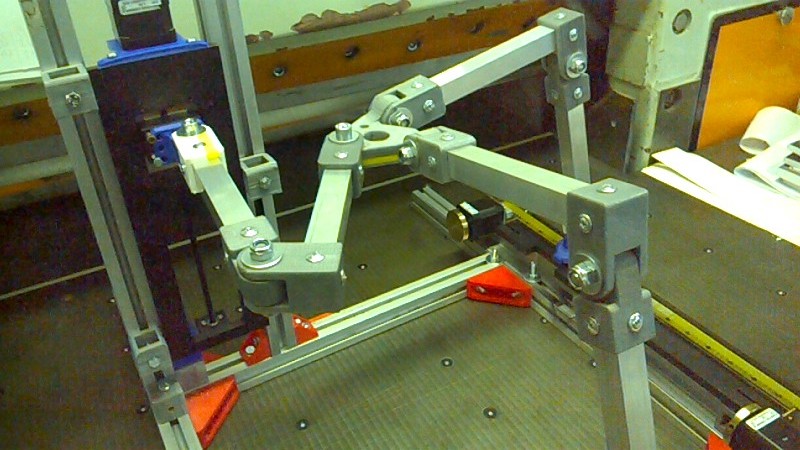
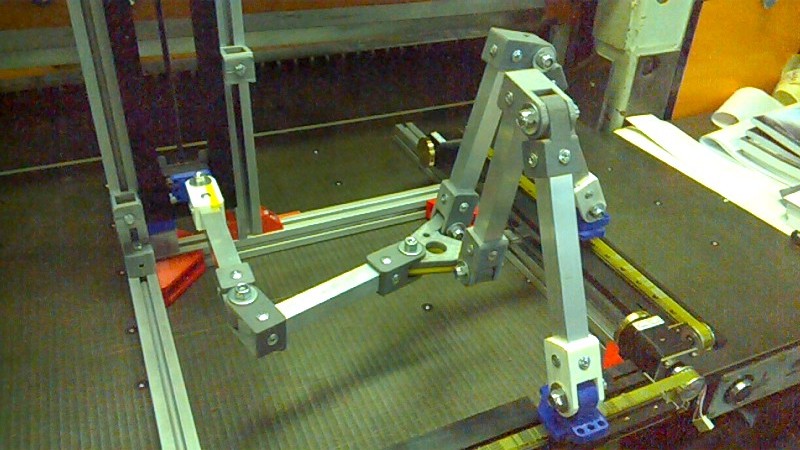
Tény viszont, hogy a karok rugalmassága (flexibilitása) enged némi deformációt, a sebesség növekedésével hatványozódva.
20mm/s alatt a léptető motor felbontása +/- 1-2% a pontatlanság.
20mm/s felett meg a sebesség arányával növekszik de nincs 6-7% felett. Ami igaz már csak 0.1mm alatt van! Tehát hajszolni csak válogató, vagy szelektáló gép ként lehetne! :D
Amit én észrevettem az a rezonálás rosszul tűrése. Z tengely alsó és felső pontján nagyon érzékeny rá, köztes pontokon már kevésbé.
De mint lentebb írtam elbontásra kerül.(Biztos nem azért mert ebben látom a jövőt!)
U.i.: (Egyszer majd összefuthatnánk, ha már Miskolc!)
De, valószínüleg könnyebb. Aztán számold ki, hogy precízebb megvalósításra, mondjuk 0,05-re milyen csapágyazással kéne elkészíteni, hogy olyan hosszan tartsa az ismétlési pontosságot, minden megközelítésből, mint egy sima xyz. Valamennyi súlyért cserébe, beleviszel kb 1,5x annyi karhosszt, ami extra rugalmasság, és fix csavarkötések helyett, beraksz +9 csuklót. Nem valószínű, hogy nem azért nem terjedt el, mert emberek nem gondoltak erre vagy hasonló megoldásra korábban, hanem a megvalósítása pontosan nem feltétlenül olcsóbb, és a több mozgó alkatrész miatt garantáltan megbízhatatlanabb. Szerintem!
Szerintem semmiféle gyorsabb mozgás nincs. Ha csak egy tengelyre figyelsz az nem más mint egy oda-vissza mozgás ami a karok tömegét mozgatja. Ha nem lenne ott a többi kar csak a kocsira rögzítve egy ugyan ekkora tömeg, a mozgatás sebessége ugyan akkora maradna. Mozgatás végsebesség gyorsulás akkor lenne, ha a karok hossza valamiféle áttétel növekedést okozna. Szerintem itt erről szó sincs.
Látványosnak látványos és érdekes, de a gyakorlati hasznát másfél éve(mikor először találkoztam a megoldással) sem értetem. Ez egy klasszikus XYZ kinematika alapvetéseiben, csak belekerült egy rakat csukló, mint hibalehetőség.
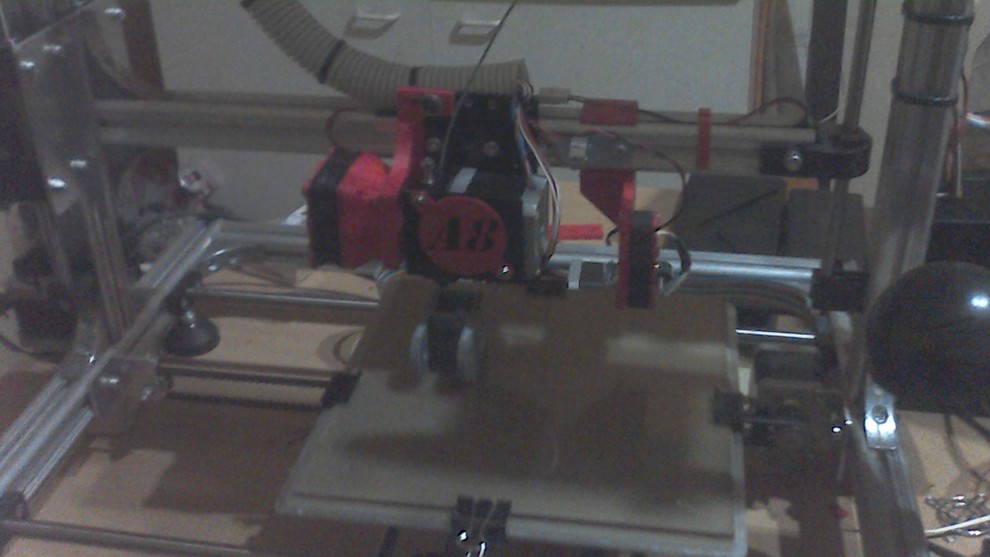
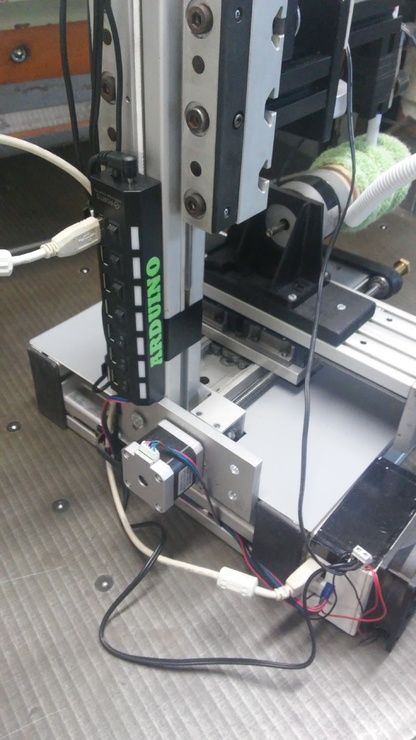
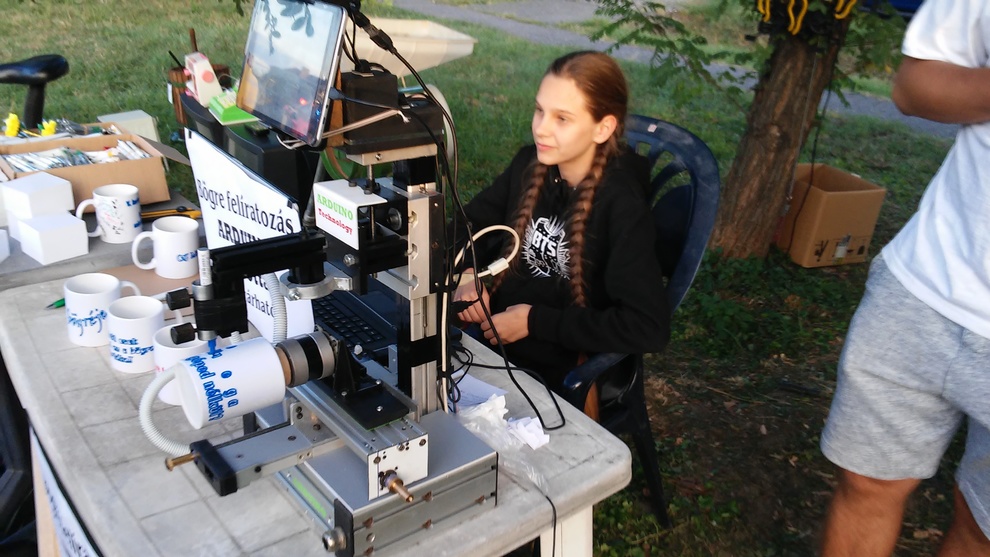
Az első képen a szerkezet hátulról. jobbra lent az arduino+cnc shield bedobozolva agresszíven hűtve. Zöld arduino-felirattal ellátott USB elosztó külön megtáplálva 5V-al, hogy a rákapcsolt eszközök ne a tablet energiáját zabálják. Ide csatlakozik az UNO is, de ha kell akkor egér, adathordozó, billentyűzet vagy bármilyen USB-s eszköz kapcsolható a rendszerbe.
A második és harmadik képen egy olyan tablet tartó amely feszültség átalakítóval (gyárilag) a 12v-ból 5v+adatforgalom nyerhető. A tablet az eső képen lévő elosztóhoz, míg a tartó annak áramellátásáról gondoskodik.
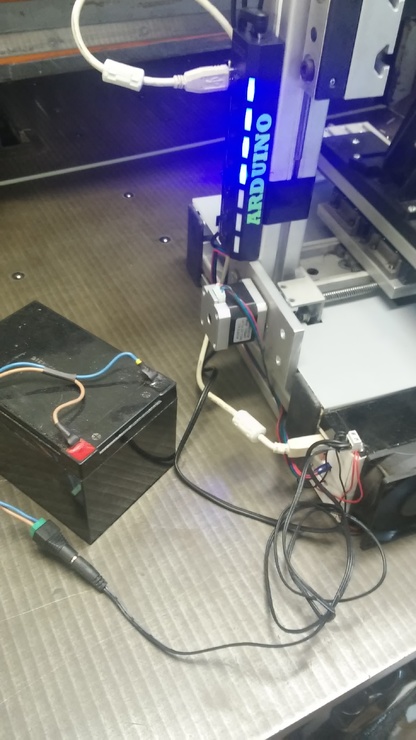
A negyedik és ötödik képen működés közben látható. Közvetlenül kapcsolódik a shield, a ventilátor és a tablet tartó.
Érdekessége a rendszernek, hogy egy laptop vagy PC egy mozdulattal vezérré válhat.
+ jelen konfigurálás mellet a tablet 4 órát üzemel.!.! Tehát mintha nem lenne rajta + fogyasztó. (mivel nincs is )
Majd még spécizünk rajta majd kicsit, csak akkor vagy nagyobb aksi kell vagy rövidül majd a rendelkezésre állási idő.
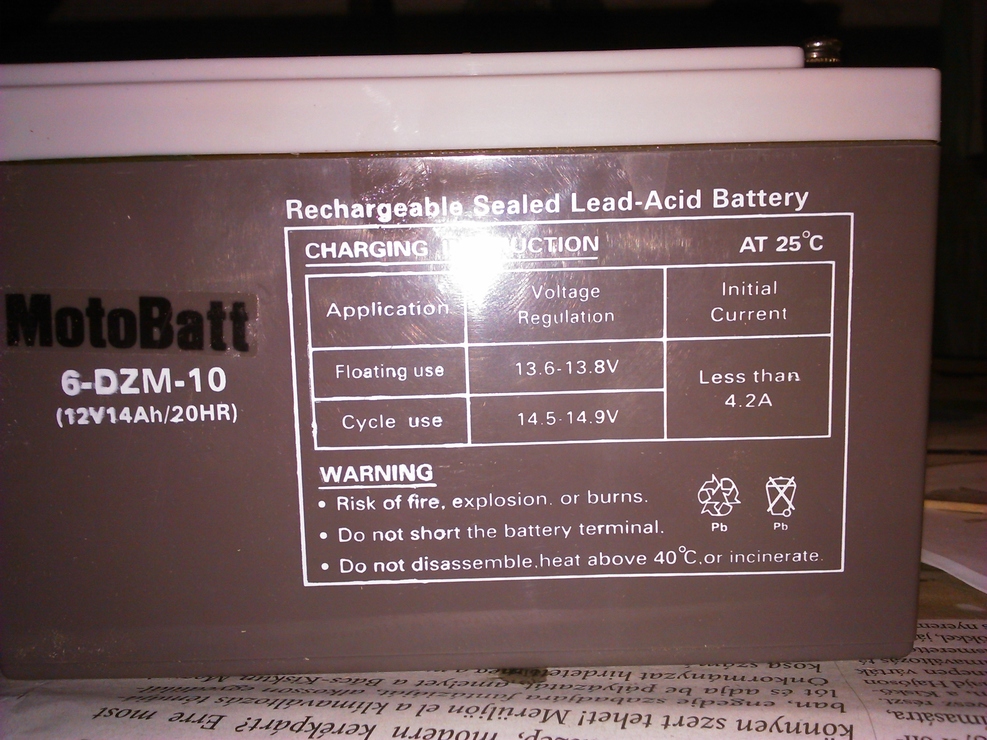
Az én rendszerem nem igényel még ekkora teljesítményt se. Az ARDUINO egy 9V elemkéről elmegy akár 12-órát is! A három léptető ezzel az aksival kb. 7-8-órát megállás nélkül. A Tablet erről az aksiról szerintem 2-3 napot.(ha nem többet)
Összességében ha az időjárási viszonyokat nem nézzük, pont elég egy napi mókához a rendszer. (este meg fel lehet tölteni)
A Laptop egy másik állatfajta. A gondunk is ezzel volt. Ezért szeretném kizárni a rendszerből. Esetleg vésztartaléknak tartani.
12 Volt pont elég nem kell a 24. max. ha szükséges akkor párhuzamosan kötök kettőt nem sorosan! :D
Ha nagyobb lenne egy pindurit a SET akkor valóban az van amit állítasz! Teljesen igazad van! De ez olyan picurka rendszer, hogy nem kell több!
"pl 12v 1A vagy 24v 0,5A nem egy?" Fogyasztás szempontjából egy és ugyanaz, de két akku dupla energiamennyiség. És nem beszélve arról sem minél nagyobb árammal meríted ezeket az ólom akkukat annál kevesebb a kivehető energia.
pl 12v 1A vagy 24v 0,5A nem egy? step-up legjobb is 85% sajnos enek ez az ára nem kinai az rosszab ... jobban járna 2db soros aksival amin nincs veszteség.... ezek elég megbizhato munka akuk ilyeneket használunk...
Milyen tollal írtatok rá? vagy is tulajdonképen az érdekel hogy amivel ráírtatok az lemosható vagy valami spéci jelölőfestékes toll , ami kibírja a mosogatást is?
PallMallMan | 447
2017-09-17 09:38:45
[117]
12V De egy kicsit bonyolultabb a megoldás. Az ARDUINO 5V USB-n csatlakozik ill. a Shield megkapja a 12V-ot. Az aksi 14.5A munka akkumulátor, amelynek még a Tablet töltése is beszámolva kb. 4-5 óra folyamatos munkavégzésre elegendő. Ami azt jelenti, hogy a lenti vásári körülmények között kb. 10 óra. Nagyobb igénybe vétel esetében max. egy pót aksi kell csak. Sajnos a bluetooth csatlakozást még nem sikerült megoldani. Így a Tablet vagy dolgozik vagy töltödik. Tehát muszáj volt a laptopot is bevetni. De dolgozunk a megoldáson! Jó sokat tanultuk egy ilyen élő erőpróba alkalommal. A gyengeségét meg próbáljuk orvosolni.
12 vagy 24 voltról hajtod ? 12 voltról a megbuherált Arduino panelem nyugalmi helyzetben grafikus kijelzővel 38.5mA , 24 voltról 24.3mA eszik. Köszönhető a DC-DC konverternek ami a 5 voltos stab helyett dolgozik benne. Eredeti áteresztős stabilizátoros felállásra már nem emlékszem.
Az Arduino és a léptecsek tápelátásával nem volt gond. Simán ment volna még. A beviteli eszközök nem bírják. A kis aksi egésznap kiszolgálta a szerkezetet.
Mióta rábíztam a "írószerszámtartó" megoldását, azóta azt hallgattam, hogy "Ö hogy fog a tömegeknek bögréket feliratozni!"
Mondjuk nem sokat tévedett! :D Reggel 9:00-tól du. 17:00-ig alig alig volt megállása. A végén már a kocsit kellet járatni, hogy legyen a laptopban delej! :D A mai nap többet kereset mint Apa szokott általában egy nap!
Láttam lineáris vezetéket és kocsit ami íves. ( gyárilag és nem sérülésből kifolyólag ilyen ) Kb 6-8 darab adott volna ki egy kört, de a golyósorsó nem kultiválja az ilyen íves dolgokat Amúgy van olan forgatóegységem ami simán körbeforgatná a bögre körül az a gépet , de még egy nagyobbat is !