Az 1 tized emeléshez a Marlin kiszámolja az adagolandó olvadékmennyiséget, a fej planner felülete pedig a furat szélességében (kb.) keni rá a felületre.
Rosszul kérdeztem. Mekkora felbontása van a gyakorlatban egy ilyen panelnak? Mert az egy dolog, hogy az enkóder chip mit tud, de mit lehet kihozni belőle gyakorlatilag? Gondolom nem mindegy hány pólusú mágnes van a tengely végére ragasztva, mennyire sikerül központosan stb. stb.
Éppen a határon jár , 3A os motorok vannak a gépemen és 40V körül lesz a tápfesz (29v os a trafóm ami egyenirányítva pufferelve elvileg 41v) de ha elfogadható árat tudnál kitalálni rá kipróbálnám . Legfeljebb ha beválik eladom a már meglévő motormeghajtót ...
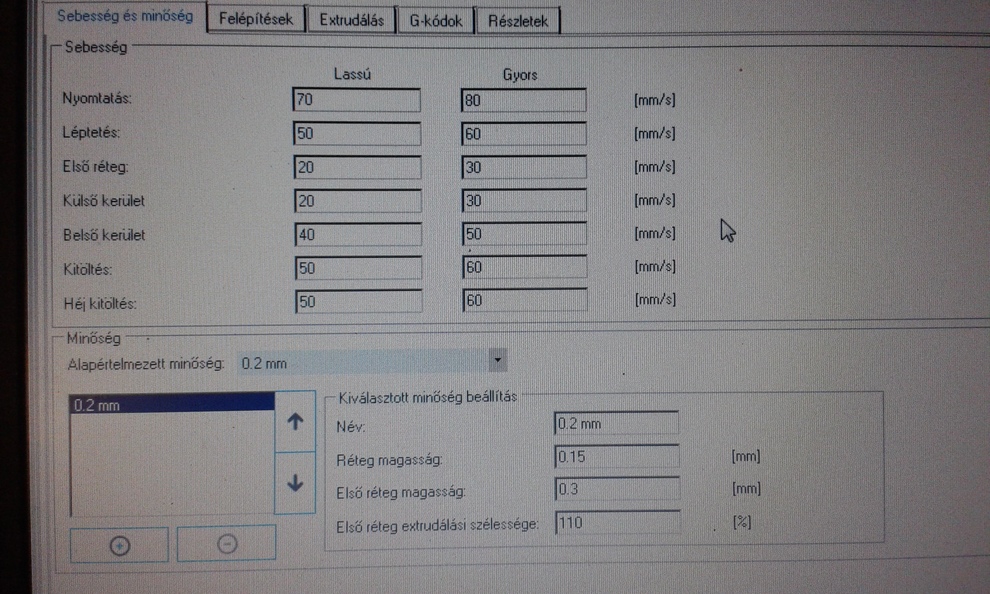
Az első réteg megy e-szerint, utána a "csúszkával" ráhúzok még 50%-ot. Ezt nálam, gond nélkül tudja PLA-val a mechanika,és az extruder is. 0,3-as fúvókával, 0,1-0,2 réteggel, de sok múlik a tárgyhűtés milyenségén/intenzitásán is.
És mennyire "érzékeny" az ilyen enkóder? A lézeremen 400-as osztású (0,9°-os) bipoláris léptetőim vannak, 1/16 mikrostep-pel. Azaz 6400 impulzus egy fordulat. Képes ezt kezelni?
Ezt most nem teljesen értem. Ez maga a motormeghajtó. 2 változatot készítettem, egy 2A-est és egy 3A-est. A léptetőmotor hátuljára kell szerelni, mivel a panel hátoldalán van az encoder. Természetesen a motor tengelyére kell ragasztani egy mágnest. A panelnek ezután már csak tápfeszre és step-dir bemenetre van szüksége.
„Az extruder egy sima MSDD vezérlővel megy ugyanezzel a kis illesztő panellel.” Akkor jól értem hogy a vezérlő és a motormeghajtó közé is beköthető ? Nekem 40 v 3A es motorjaim vannak (marógép) de jó lenne rá valami hasonló dolog ..
Step-Dir rendszerű. Készítettem egy kis panelt ami a 49xx, vagy DRV88xx vezérlők helyére dugható. Az extruder egy sima MSDD vezérlővel megy ugyanezzel a kis illesztő panellel. A max léptetési frekvencia 40kHz körül van, 24V tápfesz mellett.
A szomszédomban ennek két oka van. Az egyik, hogy a zaj egy jelentős részét nem a motor keltette. Hanem a megvezetések highfos minőségű golyós lin. csapágyai. Csapágycsere után szinte megszűnt. A zaj másik része meg javarészt eltűnt egy próbából és 4cm XPS-ből felrakott hangszigetelő burkolat alatt. Olcsó, nem ráz, és nincs hátulja, mert szellőznie kell. De a többi irányba zajárnyékol. Jobb volna fejlettebb motorvezérlőkkel és lin. vezetékekkel eleve nem zajongani, de ez meg egyszerű, mint a . . . Pofon?
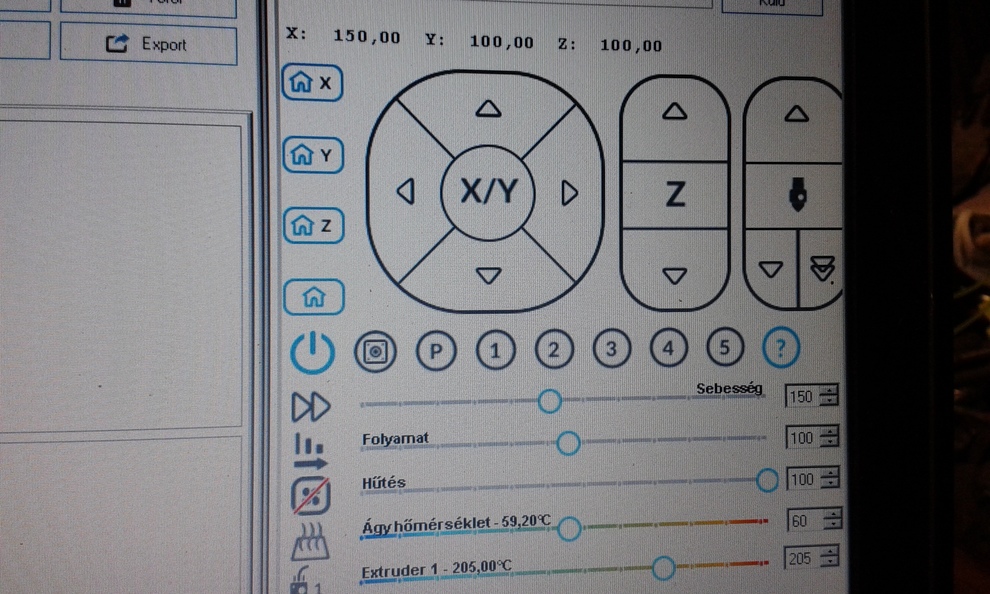
Az extruder olvasztási képessége jobban befolyásol. PL az UM2 24mm3-t tud maximum másodpercenként. Sebességre meg 300mm/s van gyorsjáratra megadva. Az extrudálható térfogatból visszaszámolva 0,4mm-es fúvókával 190mm/s lehetne a sebesség. Nyilván ennek a sebességnek vannak egyéb korlátai is mivel a mechanikák többnyire ezt nem viselnék el. Intenzívebb hűtés is kellene, hogy az olvadék időben szilárduljon. Szóval ez (is) egy kellően összetett probléma...
Szó volt a visszacsatolt léptetőmotoros megoldásokról. A NanoStepperből indultam ki. A srác Mechaduino-ból indult ki. Tett rá egy OLED kijelzőt, az alapparaméterek nyomógombbal állíthatóak. Az Aliexpress-en kapható meg állítólag tőle lett eltulajdonítva. Én annyit változtattam rajta, hogy a bemenetekre tettem opto leválasztást. Ha valakit érdekel nagyon szívesen segítek, nemrég készült el 10 db NYÁK. Nem volt még időm beültetni.






 ?
?