Sziasztok. Ez a topik nagyon jó és kérlek hogy hagyjuk is meg hobbistáknak, mivel ez egy ilyen fórum.A veszekedésből elég az adok veszek. Én se vagyok profi, és ha profik veszekednek az többségünknek csak valami, amit nem értünk. Igaz 30 év tekercselési múlttal a hátam mögött én is letudnák dorgálni sok fórum társat, de minek. Üdvözlettel a hobbistáknak Varga Ferenc .
Kisamotors | 709
2017-08-04 19:29:39
[56]
A legelső CNC-s próbálkozásaom, valóban fapados, de nagyon jól működött. Akkor még nem volt igazán jó vezérlő SW a GRBL-hez, de ma már az is van. Teljesen jó hobby gravírgépet lehet ebből építeni fillérekért.
Törölt felhasználó
2017-08-04 16:24:11
[55]
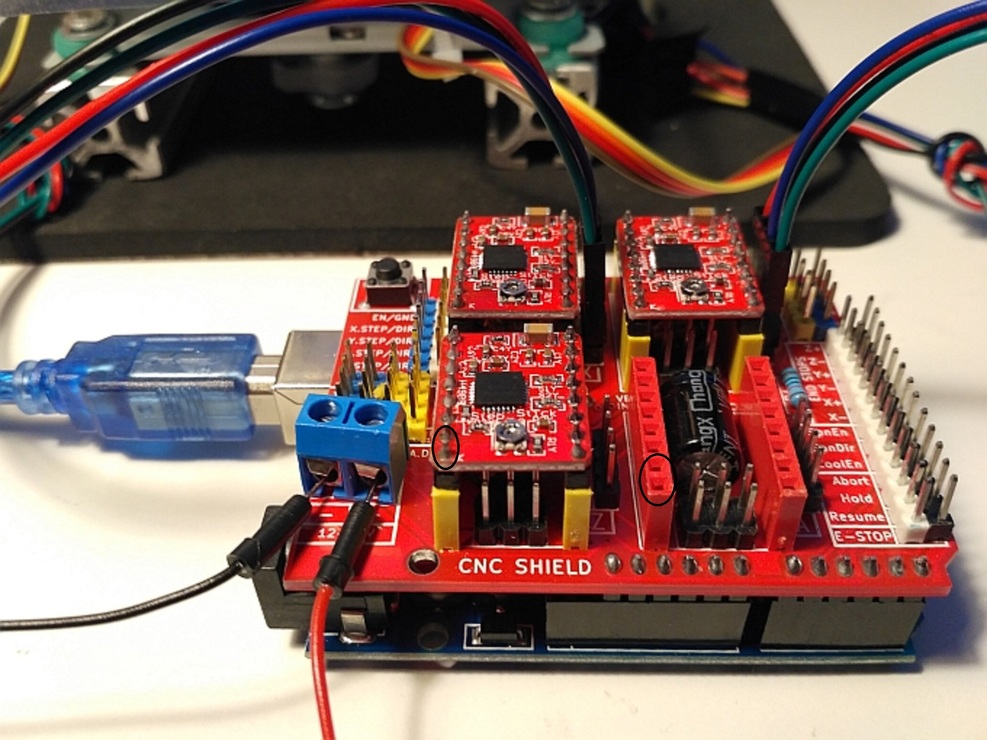
Hogy Arduino is legyen már a topikban itt egy kis CNC gép Arduino Mega + Ramp 1.4 panel DRV8825 driver 16x5 golyós orsókkal 2.4Nm NEMA 23 motorok (full step) és egy icipici 2.2kw főorsó. Csak, hogy EGYES ember(ek) tudja mire is képes !
Itt nincs apelláta csak keményen rideg tények !!!
Törölt felhasználó
2017-08-04 14:21:35
[54]
Ki probálando 1db mottor vezérlö kb 500Huf nem nagy veszteség 555 100 ft vagy lehet hogy nano közekebb kézné akad pwm modulként már othon... de lehet rajta hagyható lehetne a kitöltés diretbe enablen!
Ezeknek a gbl firmwareknek van valahol forrásuk abba ez rész bele irható is lenne... Nemrégen ép az ilyen megoldásokra csináltam egy programozható oszilátort arduino alá soros porton be adható freki és kitöltési tényezö adatok...
Majd amikor a pwm jel fázisától függetlenül megjön az első step pulzus akkor arra vagy lép a motor vagy nem hiszen step jöhet akkor amikor a pwm éppen tilt.
Nyilván ki kell próbálni előbb. Kérdés, milyen hangja lenne a motoroknak tőle. ??? Mivel a 88xx belső vezérlőjének a logikájáról fogalmunk sincs, csak a próba mutathatja meg, mi történik. Akár működhet is. A STEP figyelése talán szükségtelen. Miért ne lehetne mindig rajta az Enable-en pl. 30%-os kitöltés? Ha az Ardu épp vezérli, úgyis lehúzza 100%-ban. Egy próbát megér....
van 4 drv8825 az az 1db 555 elég lenne én ilyen megoldásra soros diodát szoktam teni minden i/o igy vissza nem megy semi mcu felé it nálunk per pillanat step és enable lább! Ezt az enable pwm dolgot egy vezérlön kiprobélnám mert a drv8825 van egy belső oszilátor ami a modulált enable lábon össze akadna e?
Valóban. Viszont, ha alacsony, akkor aktív! Engedélyezi az Outputokat, fogja a motorokat. A melegedés nem vészes, bőven kibírja a cucc, jobban féltem a tekercseket. A Cree által felvetett megoldás érdekes lehet: egyetlen áramkör "rángathatja" az összes driver Enable lábát a beállított kitöltéssel. Az Enable-t meghajtó TP kimenetek kibírják kényelmesen a 0-ba ráncigálást, ha meg ők kezdeményezik a lehúzást, az sem okoz problémát. Az 555-öt el kell szeparálni, szétosztani annyi bites Latch-el ahány DRV van a rendszerben. Nem kicsit HOBBY-megoldás, de működőképes.
enable láb logikai szinten lehet utasitani a chip erre való mind egy fet gate rész igy modulálható is kitöltésel ! Egy külsö cél áramkörel megoldható lenne nincs lépés(step) akor elindul enable lábra 10...30% kitöltési tényezö !ezt tranyo nyitva tartana step jel ami zárja adig rövidre 555 ic timer kondiját pl nincs step jel tranyo inaktiv igy 555 elindul az idözités mert a timer kondi töltödik 555 moduláció 3 láb elindul enable láb felé motor vezérlöre!
Dakota25 | 627
2017-08-04 12:52:40
[45]
A tartóáramot kétféleképp is "meg lehet oldani". - Egyrészt az ENABLE-bemenet aktivan tartásával bekapcsolva maradnak a hidak. A potival beállított áramkorlát függvényében generálódnak az effektív tekercsáramok. - Másrészt a 3.3V-os belső referenciafeszültség helyett külső referenciát alkalmazva, egy a STEP jellel vezérelt monofloppal, beállítható feléledési idejű és mértékű tartóáram alakítható ki. Más kérdés, hogy érdemes-e egy 123-ast, kondit és ellenállásokat rádrótozni egy pololura.
Elkezdtem építeni a saját 3D nyomtatóm aminek a Z tengelye plusz 4 darab teli 1.5 liters ásványvizes üveg tömegét mozgatta egy kis 1.5 Amperes bipolásis motorral Szinte egész nap ment fel le és nem igazán volt probléma a kis bélyeg méretű vezérlők melegedésével.
Az áram csökkentésre meg egy viszonylag egyszerű megoldásom van, az engedélyező jel egy trazisztoral a VRef lábak feszültségét a feszosztó után beterheli egy ellenállással. Így az áram a töredékére esik Igaz a panelt át kell vágni , de a cél szentesíti az eszközt.
Egy német gyártó "linear trip" nevű eszközében A4988-as IC van. Egy kb 1,5kg mintavevő fejet emelgetett de, ha kellet akkor egész nap pozícióban állt. Azaz tartóáram segítségével működött.
(Az általunk a 3D nyomtatókban használ hasonló léptetőmotor volt benne, meg még golyós orsó, encoder, miegymás)
Kb egy évvel előbb megy a szájkarate akkor be is mutattam volna. Lehet valaki kis le is koppintott volna a megoldást.
Törölt felhasználó
2017-08-04 12:33:58
[39]
Azért mert a két meghajtó gyári pdf adatlapjóból az Rdson adatok alapján picit számolgattam, az TÉNY, és nem "topik "szétbaszás, ez a te speciális értelmezésed. Persze ismerünk már, tegnap is azt írtad, a hobbysta olyan különleges lény, hogy: "Egy hobbistánál az is működhet, ami a nagykönyv szerint...nem."
Mi van??? Ezzel szemben remélhetőleg az előitélet nélküli emberkék a soraimból tanulnak, és arra használják ezek után esetleg ezeket a meghajtókat, amire valók.
És mégis mikor térünk rá az arduinos részekre mert eddig csak a motorvezérlőkről volt szó ? Ez belefért volna a 3D-s nyomtatós topikba is.
Például a Firmware és ennek rejtelmei jobban érdekelne amihez ámokfutók nem tud hozzászólni.
Törölt felhasználó
2017-08-04 12:25:55
[37]
Na fussál megint neki, és tanuld meg, és értsed meg, mi az egész lépéses üzemmód bipol hajtásnál.
És van pár újabb rossz hírem, ugyanis a kapcsolási veszteségekkel nagyobb tápfeszeknél, hatásfokkal még nem is számoltam, hiszen azok is komoly veszteség növelő tényezők jóidulatból.
Áruljátok el, miért kell ezt a topikot is szétbaszni, már az indulása másnapján?
Törölt felhasználó
2017-08-04 12:19:22
[35]
És hogy a hozzáértésed tükrözzem mennyire ZÉRÓ egész lépésben is működik a PWM ami az áramkorlátozást végzi ezért is döglött a érvelésed ! 6.4 Wattot disszipálna az a körömnyi panel akkor pillanatokon belül vörös izzásba menne át. De ezt nem teszi ergo a levezetésed újra és újra hibás !
"Nagyon komoly gépek vannak hajtva ua ezzel a chip -el."
Vicces emberke vagy.:)
Mellesleg végeztél egy picike hajtás gyorsulás optimalizálási méretezést, amikor befogtad a motorjaid CNC-zni? Mert az nem úgy van ám, mint a linkeden, hogy kiberhelek egy CD író mechanikát hangyafaszányi léptetőmotorral, aztán rápakolom a bazi nagy plexi lapot, mint mozgó asztal, vagy "megzuhanó" konstrukciókat építve CNC-getsz.
A cnc shield praktikus, de az általam fellelt motorvezérlők elég "karcsúak". Mint remrendes írta, ha az arduinoról direktben leveszem a step/dir jeleket, akkor minek a Shield? Én arra szeretnék választ kapni, hogy létezik-e olyan izmosabb driver, amit ugyanúgy a shield-re lehet dugni, és a motorok is a shield lábaira vannak kötve nem a driverekre.
Olvass, és értelmezz, mielőtt szokásod szerint fitogtatod a nulla közeli tudásodat. Minden rendben van a leveztésemmel! Igenis van olyan eset, pl. egész lépéses üzemmód, amikor állandóan ekkora a hővesztesége ezen meghajtóknak.
De miért is kénre veled itt foglalkoznom, aki szakmailag naponta téved nem is kicsiket, és nem veszi észre magát, hogy ha kvesebbet, de jókat írna az sokkal több lenne.
Íme a tegnapi gyönyszem melléfogásod egyike:
"Pál | 6616 Válasz erre Tegnap 16:17:24 +⚐ Kedvenc Törlés | [34550]⎆
Először is 3 fázis és ehhez trafó mert ez egy tirisztoros hajtás őskövület aminek a beavatkozási sebessége függ a nullátmenetek számától. 3 fázisnál ez 150/másodperc."
Három fázisnál mióta 150 a nullátmenetek száma? Ja mert te mondtad, az igazság épp a duplája.
Úgy általában kérdezem: Az Arduino+CNC shield pároshoz nincs "komoly" motor meghajtó? Mindenhol csak az olcsó A4988 és DRV8825 drivereket látom. Persze kényelmes mert kicsi és csak rá kell dugni, de elvben lehetne akár nagyobb méretben korrektebb hűtésű/tudású driver is...
RJancsi | 5811
2017-08-04 10:32:27
[25]
És mi van akkor, ha csak a Z tengelynek adsz valami komolyabb vezérlőt, az X-Y marad az occsó? Esetleg a Z tengelyre felraksz valami mágnesféket, ami rögzíti ha nem kéne mozognia...
Nem érted az írásod lényegét! Bármilyen hihetetlen de igen komoly igénybevétel melett sincs gond a vezérlővel, 2A 24V jó beállítások mellett teljesen rendben van minden! Valamiért a tartóáram ténye az ami nem nagyon tetszik a chip -nek. Ez valószínűleg az olcsó előállítása részére rohatò fel. Nagyon komoly gépek vannak hajtva ua ezzel a chip -el. Tehát valami párszáz forintos alkatrészek ki vannak spórolva az olcsó piaci igényeket miatt. Ezért gondoltam hogy ezen alkatrészek vissza aprikálásával megoldhatò lenne a problémám.
Mint lentebb írtam a z tengelyen lévő súly többlet tartòáram hiányában a híd megzuhanását okozhatja (okozza ). Ezért van ez az egész tartòáram cirkusz a részemről.
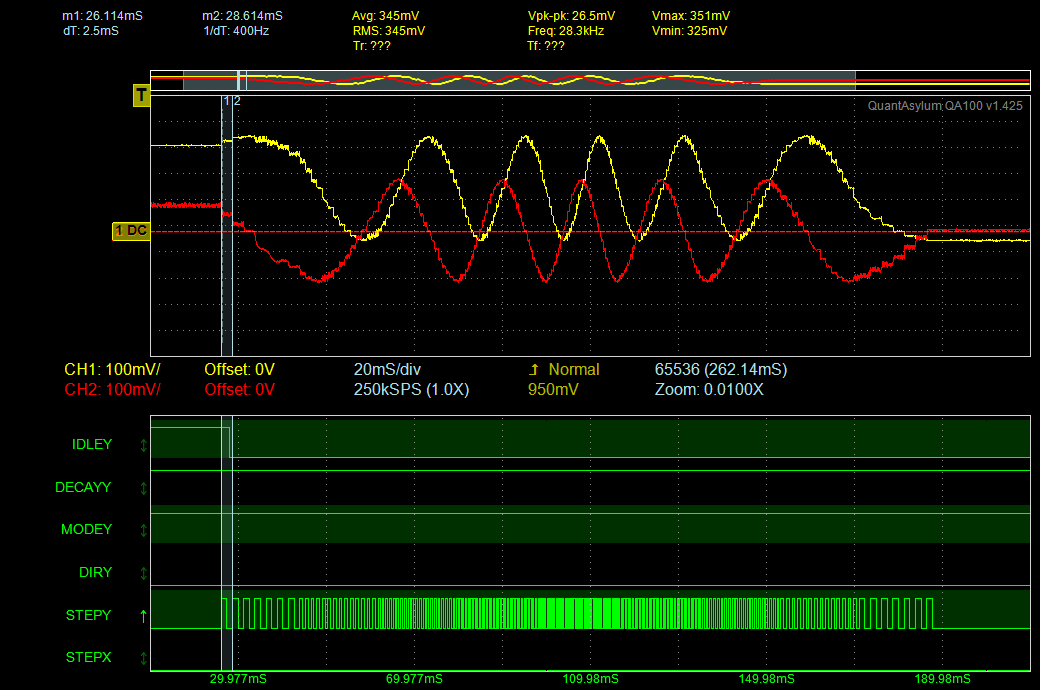
Akár igaz is lehetne ha folyamatos DC-ben működve, de nem ! És itt van a blöki elásva miért sem melegszik úgy mit egy forrasztópáka. ( mellékelt ábra ) A DRV8825 vezérlőm 1.5 Amper mellet egyáltalán nem melegszik itt a 24 fokos szobában folyamatos tartóáram mellet. Ami azt jelenti, hogy az a pici tok biztos nem disszipál el ekkora őrült teljesítményt !
A "szakmai alázat" és egyébb lejárató részleteket kéretik megtartani gondolati szinten ! A képre kattintva nagyban is látható, hogy ne keljen erre hivatkozni.
1. Ha olyan a mozgási feladat, a G kód, hogy alig áll a motor, akkor mit érsz ezzel a tartóáram hóka-mókával? Nagyjából semmit.
2. Ezek a "játék" meghajtók, nyilván objektíven csakis olyanok lehetnek, amilyen az áruk, méretük (normálisabb meghajtó nem véletlenül 10 ... 20-szor drágább). Ebből adódóan vasba öntött az igen rossz Rdson adatuk, FET-enként 0.2 - 0.4 Ohm. Hajtáskor a két hídban 4 FET dolgozik, így ha csak 1.414 A motorárammal számolunk és a legrossszabb Rdson-al, akkor P=1.414*1.414*4*.4~=3.2 W csúcs hőteljesítmény keletkezik a motorvezérlő IC-ben. Ezt kell tehát alapul venni, és egy normális, megfelelő méretű hűtőbordával (nem azzal, amit adnak hozzá újabb játék elemként) elvezetni. Ha pedig valaki arra vetemedik, hogy 2 A-rel is hajt motort ezekkel, akkor a négyzetes függvény hatás miatt már a duplája, tehát 6.4 W a hőteljesítmény!
Bele kellene nyugodni a hobbystának ezen a fronton is a TÉNYEKBE, függetlenül attól, mit hisz, mit gondol, mit akar, mi tetszik neki, mivel verik át a fejét. Egy kis logikus, reális gondolkodással sok kudarctól megkímélhetjétek magatokat a "VLB" hozzáállás helyett.:)
Tegyél arra a tengelyre olyan vezérlőt amiben van tartáskor csökkentett áram. PL: Leadshine vezérlő. Igaz nagyobb lesz mint az egész panel , de megoldja a problémát.
Nem lehet egy tranyóval áthidalt ellenállást beiktatni a motort hajtó híd tápágába? Tartáskor nyit a tranyó léptetéskor pedig zár. Ezzel a disszipáció nagyja az ellenállásra jutna.
Jelenlegi projektemben megtízszereztem a tartási időt, így lett majd egytized másodperc! :D Természetesen a hűtés is intenzívebb lett. A fő probléma a Z-tengelyen jelentkezik. Ha komolyabb feladat elvégzése a cél, egy testesebb marómotor segedelmével, akkor úgymond képes megzuhanni a z-tengely motortartás hiányában.
Tudom tudom nem erre való! De mégis szeretném megoldani a problémát!
Szoftveresen az arduino felől én tudok neki tartó áramot adni csak úgy egy idő után kijön a DRIVER-ből a füst amit nagyon nehéz vissza rakni! Tehát nem az a gond hogy nincs tartóáram hanem az hogy az nagyon terheli a chipeket. Ezért kérdeztem nincs-e erre valakinek valami frappáns megoldása!
Nézem azt a két drivert amit árulnak a shield hez... legalább is ezeket találtam drv8825 A4988
én úgy látom mindkét driver tudja azt hogy visszaveszi az áramot, viszont valami csalafintaság azért van, így vagy úgy állítani lehet a gyorsaságot, gondolom az egyszerűség kedvéért, leggyorsabb reagálásúra van rakva mindegyik, így meg biztos több áramot vesz fel...




 "
"