En nem kotekedni akarok, de szerintem Gabor sem akart. Igazabol engem is erdekelne, hogy az atmerok 2, 6 vagy 10mm-rol indulnak, szamomra ez nem derult ki. Azt ertem, hogy gyorsulas-attetel grafikont latunk, de az is erdekes lenne, hogy milyen osztasban. Lehet, hogy a gyorsulas tengely erteki kozott elhanyagolhato kulonbseg van? Altalaban nem lehetne beled kotni, de sokszor csak fel informacio er el hozzank.
Nyilván hatással van rá, és lehetne a méréseket számos új mérési feltétellel kiegészíteni, ha minden részletre kimenő teszteket akar valaki. Egyelőre így is nagyon sok a változó, a peremfeltétel, és fő vizzsgálati kérdésként ha sajnos az bizonyosodik be, hogy ugyanaz a motor ugyanolyan mérési feltételek mellett X, vagy Y motorvezérlővel teljesen másként viselkedik, és szinte nem is rezonál, akkor a mérés ezen tanulsága máris kézzelfogható.
A szomorú valóság az lesz igazán, hogy ha majd egyszer teszek fel ilyen terheléses mérési eredményeket is, ezek még rosszabb pozíció követést mutatnak a léptető motorok esetében. Hiszen még nulla motor tengely terhelés esetén is egyre inkább kezd lemaradni, elcsúszni a valós és kiadott pozíció, és a végén szétesik a hajtásrendszer, és a lépéstévesztés jelenség sorozat következik be a mérés kapcsán.
Ha nem láttam volna már a görbéket korábban akkor a mostaniról (vegyük Vadnyuszit aki most látja elöször ) honnan tudnám hogy a vízszintes tengelyen az alkalmazott áttétel van? Sem a beírásból sem a görbékből az nem derül ki
Te azzal foglalkozzál elsősorban, hogy kezd el megérteni a sebesség és az út fogalmát. Halkan jegyzem meg, ez általános iskolai tananyag. Ha majd eljutsz a megértési folyamat kapcsán valameddig, akkor nem írkálsz olyan orbitális szakmai ostobaságot, hogy "A nagy csodás mérőpadhoz elég egy tachogenerátor és egy oszcilloszkóp."
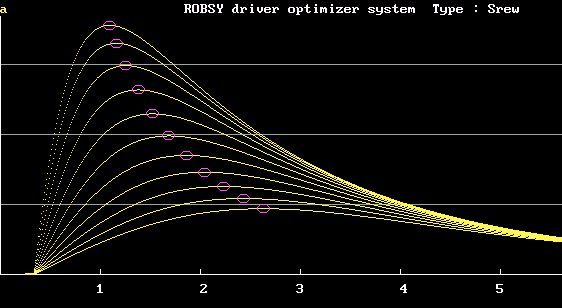
Tévedésben vagy, mert ez a beírásom csak az átmérő hatását mutatja be a J-re, ezáltal pedig a hajtás optimális gyorsulási képességére. Így aztán mivel ott vannak a vízsintes gyorsulási szint vonalak, valamint az áttélei arányok is, teljesen tanulságos és érthető a tendencia, az ok-okozati összefüggés. Megkérnélek, Te is fejezd be azt a stílust, hogy ha meglátod a Robsy nevet, akkor előjön benned a szubjektív előitélet, kötekedés, míg az igazi objektív műszaki érveid erősen háttérbe szorulnak.
Azt hiszem rátapintottál a lényegre, mert ilyen ábrákkal bárki teleszórhatja a fórumot, de haszna max annyi mint vödörbe ordibálni. Majd figyeld ki, a szakmai alázat és egyéb lejárató kampányt amit ide lesz biggyesztve ezért !
Sokkal többre mennénk ezekkel a görbékkel ha az ordináta értékekkel, és dimenziókkal lenne megadva .Az abszcisszán vannak ugyan számok de mik azok arra csak tippelni lehet ( de a dimenzió hiányában az sem ér semmit ) Az már hab lenne a tortán ha a görbék paraméterei is jelezve lennének .
...és hogyan változik a hajtás rezonanciája, ha a Nema 17-es motor terhelten fut, mondjuk egy fogazott szíjas hajtással, ami eleve rezgéscsillapító hatású. Mértél így is, vagy csak szabadon futó motort teszteltél?
Érdekelne, hogy a helyén miként viselkedik egy hajtáslánc, nem csak a motor saját inerciájára hagyatkozva a tesztek során.
Van egy nagyon ütős összefüggésa hajtásméretezésben, lehet tudod is, volt már a Fórumon erről szó. Nevezetesen egy forgó tengely vagy tárcsa tehetetlenségi nyomatéka az átmérő NEGYEDIK hatványával növekszik. Minden tized milliméter számíthat, ami felelsleges az áttételeken, és a golyósorsón, a megyedik hatvány letarolja álmainkat, és kemény realitásra készerít. Ezt szemléltetik a hajtásméretező progim alábbi sorozat jellegörbéi, ahol csak annyi történt, hogy 2 miliméterenként növelvea golyósorsó átmérőjét szemléltetésre került a negyedik hatvány hatása. Jól látszik, hogyan veszíti el a dinamikai képességét a hajtás.
A tachogenerátor szinte minden szervómotoron DC annak ellenére, hogy hibásan generátornak van mindenhol írva. Ez is csak kicsinyes "mérnöki" kötekedés !
És kit érdekel a pozíciójel mikor rezonanciáról volt szó ? Ha nincs rezonancia nincs számottevő lépéskésés sem ! A kevesebb néha több, minek csináljam meg újra mikor van róla profi videó is ? Tehát te égsz itt mint a Reichstag !
Két betűcske, "DC" van ott, amit te elhagytál, én meg PONT ERRE hívtam fel figyelmet. Az ilyen eszközt magyarul dinamónak hívják és nem generátornak.
Aztán hiába linkleled sokadszor ezt a videót, az a rossz hírem van továbbra is, azon az oszcilloszkópon a tachodinamóból származóan NEM pozíció jelek láthatók, hanem sebesség jelek.
Hát így jártál, tovább égeted magad egy olyan videóval, aminek semmi köze a Robsy motordinamikai a mérőrendszerhez, és az 5304 bejegyzésem mérési eredményéhez.
Vedd már észre: 1. A kevesebb néha több, nem kell neked mindenhez nem saját tudással, hanem google keresővel reagálni. 2. Motor hajtás témakörben nagyon nem vagy velem egy súlycsoportban műszaki tudásodat illetően, ezért hanyagoljál az ostoba hozzászólásiddal. 3. Ha az első két pont nem érthető, égessed magad tovább itt a fórumon a topikromboló viselkedésed kapcsán, nekem aztán nyolc, engem nem idegesítesz vele, hiszen imserünk már itt sokan.
Mikor kezdtem tervezgetni nagyobb nyomatékú motort szerettem volna de költségek közbeszóltak. Biztos van benne valami amit mondsz, hogy az inerciaviszony jól meg választása hajtás rendszer alapja. Persze végig nem érő számítgatásokba is bele lehet menni de mindent figyelembe venni ugysem lehet.
Nem beszélve a kínai cuccok megadott paraméterei néha igen csak kérdésesek. Én már elégedett lennénk egy olyan rendszerrel aminek a terhelés tehetetlenségi nyomatéka nem nagyobb a motor tehetetlenségi nyomatékának 5-6x sával de mindennek árra van szó szerint.
Az előző és a fenti adatokkal, gyorsító áttétel nem nagyon tetszik nekem ez elsőre. Főleg nem, hogy az 1,7 kgcm2 inerciájú motor tengelyére rögtön felpakoltál egy 0.6 kgcm2-es kereket.
Valószínű nálad a nagyobb emelkedésű orsóra váltás hozná meg a jobb eredményt. De ennek jól utána kellene számolni.
Bizonyára elkerülte a figyelmedet, hogy ez a rendszer nem csak a léptető motor, hanem bármilyen step/dir szervo bemérésére is alkalmas, és gondoltam összemérek pár szervót akár egy step motorossal is, mi is a helyzet. Nagy legendák dőltek meg, annyit elárulhatok.
Az aktualitását pedig az adja, hogy bizonyos kőkemény teszt ábráimat nem tudtam szépen lézerrel gravírozni, és a jelenségeket meg kellett "kutatni" ilyen mószerekkel is, miért nem ott vannak a lézerpöttyök, ahol kellene lenniük.
Aztán arra is gondoltam, talán ez a téma megér egy misét ezen a Fórumon is, és képvisel akkora tanulságot, mint pl. egy részeg sofőrös videó link.
Pár magánlevélben is kértek arra, írjak már ezen dolgokról, amit tudok, mert őket is érdekeli a működés mélyebb tartalma, és nekik is volt olyan olyan lépésvesztési, poziconálási problémájuk, amire ezek a mérési adatok magyarázatot adhatnak.
"A nagy csodás mérőpadhoz elég egy tachogenerátor és egy oszcilloszkóp."
1. A tacho generátor váltakozó feszt ad ki, így eleve nem jöhet szóba ilyen mérésre. 2. A tachó sebesség mérő eszköz, ha nem vetted volna észre a mérések a pozícióról szólnak. Hol látsz te a szkópon pozíciót? 3. Hol van a hiteles step/dir vizsgáló alapjel egy szkóp meg tachó esetén?
Most őszintén, jó az neked, ha ennyire égeted magad? Hiszen arról tettél ismét tanubizonyságot, hogy a sebesség és út és vizgálójel fogalmát se ismered, és szakmaiság helyett csak kötekedő, topikromboló írási, és böfögési kényszered van, ha meglátod a Robsy nevet.
Csak szintén kíváncsiságból. Mi az oka, hogy mostanában ennyire belemélyedtél a léptetőmotorok lelki világába? Hiszen már vagy nyolc éve AC szervo motorokat forgattál saját elektronikával.
A 300 1/min körüli rezonanciát mindenki megtapasztalja, a microstep is csak gyengíti a jelenséget de nem szünteti meg.
Valami visszacsatolt rendszert kreáltál? Esetleg a vezérlőddel ténylegesen ki akarod/tudod zárni a rezonáns pontokat? Mert, hogy valamire ki akarsz lyukadni az hót' ziher, nagyon tolod elénk a grafikonokat.
Amivel most kísérletezgetsz azt már rég el is felejtettem ! A nagy csodás mérőpadhoz elég egy tachogenerátor és egy oszcilloszkóp. Csak nem mindenki veri itt a mellét, hogy így meg úgy a mitudoménmilyen névtelem mérőrendszer. Tehát hátrébb az agyarakkal ami a szakmai tapasztalatot illeti !
"Mintha erre utaltam volna már, hogy nem a léptetőmotor és a vezérlő fogja ezt megoldani"
1. Kár sokszor ugyanazat a téves állításodat szajkózni, ugyanis a kevesebb vagy semmi hozzászólás egy témához, az több, ha lövésed sincs a valóságról, a műszaki tényekről.
2. A beírásom EGY ADOTT hajtás konfiguráció esetén a rezonacia jelenségét mutatja be konkrét bemérési adatok mentén.
3. Ha a bejegyzésemnek tárgya lett volna más meghajtóval elvégzett mérési eredemények összevetése, azok is világosan és egyértelmnűen kimutatják, hogy bizony X vezérlő sokkal jobban megoldja a rezonacia problémát ugyanezen motornál, Y kevésbé. Annál is inkább mert manapság már léteznek olyan korszerű pl. DSP alapú microstep algortitmusok, megoldások, amik a rezonancia kezelésben is sokkal többet tudnak, mint egy hagyományos vezérlő. A decay lekezelési módok, lehetőségek, belső PWM órajelek, FET Rdson-ok sem szoktak azonosak lenni, így könnyen belátható, hogy az idézett mondatodnak semmi szakmai alapja nem volt.
ha már megint léptetőről van szó egy kis saját tapasztalat:
A gépemen léptetők vannak AM882 vezérlővel. Szerintem ezek a legjobbak közé tartoznak. Tényleg szépen mennek, lépésvesztést is figyelik, egy bizonyos fordulat fellet. Van benne egy olyan funkció hogy a rezonancia frekiken ki lehet kompenzálni a rezonanciát. Nos ez nagyon szépen megy, szinte teljesen rezonancia mentes lesz bármilyen fordulaton. Na de ha irányt váltok akkor rosszabb helyzett mint hangolás nélkül. Tehát ez nem megoldás. Egy irányba hangolva a másikba romlik a helyzett. Igy ezt a funkciót nem használom.
Mintha erre utaltam volna már, hogy nem a léptetőmotor és a vezérlő fogja ezt megoldani. Mivel az összes ma kapható léptetőmotor alap tulajdonsága a rezonancia ! Ameddig a mágneses tér ezen a módon oldja meg a léptetést a rezonancia elkerülhetetlen ! Az a motor ami némileg segítene az a mai állás szerint még ipari szinten is drága és egyre jobban feledésbe merülőben van.
A szakmai alázat és egyéb becsmérlő szavakat kéretik mellőzni !
Törölt felhasználó
2017-08-30 14:00:28
[5304]
"a rezonancia csodákra képes"
Valóban, a léptetőmotoros hajtások rezonaciája egy adott sebességnél nagy bajok forrása lehet. Íme itt egy mérési példa, amikor még a viszonylag jó képességű MSD vezérlő se tud mit kezdeni a kis "vacak" nema 17-es motorral:
Sajnos ha valaki ezzel nem törődik az adott hajtásánál, azaz hogy hol vannak ilyen veszélyes tartományok, akkor ha hobby, ha profi a felhasználó, ebben a sebesség tartományban nagy csodát, nagy minőséget ne várjunk a CNC gépünk kapcsán. Sőt erősen javasolt elkerülni ezeket az előtolás értékeket, hiszen a mérésből az is látható, milyen vacak a motor valós poziciónálása. Ha ezt nem tudjuk, sejtjük, akkor marad nekünk a vezérlő virtuális "megnyugtató, népámító hazugsága" a pozíció, előtolási sebesség kijelzése kapcsán.
Köszönöm a válaszokat, tesztelem, hogy egy kis plusz áram mit jelent illetve megéri e tunig a nyüstölést. De gyanus, be kell érjem a 3000 előtolással ez még stabil és biztonságos zóna. Ha egy második gépet építenénk sok mindent máshogy terveznénk de szerintem ennek soha nincs vége, mindig van vmi amit lehet jobban vagy máshogy. Talán egyszer rászánom magam egy szervós 5tengelyes gép építésre egyelőre le köti az időm ez a kis 4tengelyes.
Ha viszont az optimális gyorsuláshoz tartózó áttétellel túl lassú lenne a szánok mozgása - a faiparban, vagy nagy munkaterületű gépeknél gyakran előfordulhat- akkor nincs mese marad a kompromisszum, vagy a zsebbe nyúlás és nagyobb motor vásárlása. Illetve a hobby gépeknél még elő szokott jönni az a probléma, hogy fizikailag nem bírják a nagy gyorsulást a szedett-vedett mechanikák.
A lépésvesztés a fordulatszám és a gyorsulás függvénye. Ha szép lassan pörgeted fel a motorrral a hajtásodat akkor meglepően nagy sebességeket lehet elérni, de ez általában használahatatlan.
Tanítóink szerint a megmunkálógépek mellékhajtásait gyorsulásra optimalizálják, tehát nem tehetsz mást -ha a motor, elektronika és a mechanika adott-, mint, hogy addig variálod az áttételt az orsó és motor közt amíg el nem éred a maximális gyorsulást.
Ehhez nem feltétlen kell különösebb műszer, akár a Mach3-al is tesztelheted a motortuning bállításait állítgatva. Nem utolsó sorban a valóságban is ezzel a szoftverrel fog menni a gép.
Nagy vonalakban ki is lehet számolni, hogy kb. mekkora áttétel lesz az ideális, ebben is tud neked segíteni Robsy ha beírod a hajtáslánc pontos adatait.
Általában elmondható, hogy addig növelheted az áramot amíg normál, folyamatos használat mellet sem emelkedik a motor hőmérséklete olyan 80 C fok fölé. Ezt a hőfokot egy átlag ember tenyere alig 1 másodpercig viseli el. (vannak márkás specko motorok amik akár 110 fokon is üzemelhetnek)
Az e fölötti áram már valószínűleg csak ront a helyzeten, mert telítődik a vasmag, amit hallani fogsz a motor hangján is.
A mikrolépés nagysága nem befolyásolja különösebben az áramot.
Kapiskálom, hasznos dolognak tünik ha egy adott rendszerhez keressük a legjobb összeállítást, de sajnos hobby szinten az anyagiak nem engedik meg hogy szabadon valaszam a legjobb technikai paraméterekkel rendelkező hardvert. Persze a kalibrálni a rendszert így is sok információt tudna nyújtani bár nehez univerzális munkapontot beállítani pl óriási a fém és fa közötti paraméterek közti igények.
"Mivel jellemezhető egy léptető motor jósága? vagy is milyen lenne a legideálisabb az esetemben?"
A motort valamilyen vezérlő sok fajta beállítási lehetőség mellett működteti. Így sajnos az is lehet, hogy egy jó motort valaki a rossz minőségű, vagy helytelen konfigurálással hajt, így a végeredmény rossz lehet.
A motor "jósága pedig abban áll, hogy pl. a 0-4 1/s fordulatszám tartományban elvégezzük azt a mérést, amikor a kiadott step jelekre a valós pozícióját megállapítjuk. Ideális esetben a motor a stepjel kiadásakor már "ugrik" is, és nincs lemaradása vagy túllendülése. Nyilván ilyen motor nincs a valóságban, ezért arra kell törekedni, hogy viszont minél inkább szinkronban legyen a motortengely szögelfordulása a step jelekkel. Az a hajtásrendszer a jobb, ami mindig csak minimálisan hibázik (kicsi az eltérés), és kis időállandóval követi az alapjelet.
A bemérés pedig azt jelenti, hogy egy X típusú step-dir hajtást (stepmotoros, DC vagy AC szervo) Y típusú motorral Z peremfeltételéek mellett az előbbiek alapján egy speciális Robsy motordinamikai mérőprogrammal egységugrás vizsgálójelek felhasználásával működtetünk, és a valós motor szögelfordulási adatokat a kiadott step jelek függvényében ábrázoljuk. A mérési eredmények egy adatbázisba kerülnek, így a későbbiek során összevethető több fajta vezérlő vagy motor műszaki, dinamikai jósága, minősége. Így akár az is kiderülhet, hogy egy jobb léptetőmotoros hajtás legyőzi a gyengébb szervót.
Ha pedig ezeket tudod egy adott hajtásról, akkor a "hazudós" vezérlő csicsa ablakait többé már nem fogod elhinni, és helyén kezeled a virtuális monitor által súlykoltakat, és a valóságot. Lehetőleg elkerülöd azokat a gyenge hajtástartományokat, ahol a legrosszabbak a mért eredmények, így sokkal inkább megbízható, lépés és rezonanciamentes, jobb minőségű lesz a CNC hajtásod, ezáltal az azzal elvégzett technológia minősége is javul.
jól gondolom, hogy ez a bemérés a start stop határgörbét illetve üzemi tartományt segíti meghatározni? Igen ezt csak gyakorlati próbálgatással tudom az ideálishoz közelíteni viszont ez tartalmazza az egész hajtáslánc jellemzőit, rezonancia csodákra képes az ideális beállításokra jókora biztonsági tényezőt kell számolnom.
Értem, vagyis annyira nem az elektronikában nem vagyok túlzottan elmélyülve.
Mivel jellemezhető egy léptető motor jósága? vagy is milyen lenne a legideálisabb az esetemben?
A gépészeti részével és a forgácsolással nagyjából tisztában vagyok, a korlátozó tényező esetemben, ugy gondolom , hogy a tömeg tehetetlenségből adódik és korlátozza le a sebességet a beállításokból többet nem hiszem, hogy kilehet hozni, a motor jelleggörbéje adott. Egy jó szervó hajtást nehéz pótolni. Ez a dinamikai bemérés pontosan mit takar?
A motorod elég rossz adatokkal (pl. 6.4 V, 15 mH) rendelkezik, így nem csoda, ha 3500-as sebességig tudod használni. Ettől sokkal jobb motorok vannak dinamikailag ebben a kategóriában, pl. a Klavió kft-nél is vehetsz. Sajnos vasba öntött a motorod rossz dinamikai képessége, és ezen már nem segít semmi, hiszen a motor a "főnök" a CNC-ben a szerényebb vagy komolyabb képességeivel megszabja a lehetőségeket. Ha érdekel a konkrét pozíció jelleggörbéje, dinamikája, akkor bemérem Neked a Robsy motor dinamikai mérőrendszeremmel.
Az előtolás sok tényezős CNC technológiai adat, maró fordulatszám, maró anyagösszetétele, munkadarab anyaga, maró típusa, fogszáma, fogásmélység, stb. határozzák meg. Ezekből sok mindent nem tudunk, így lehetetlen számszerű adatot mondani segítségképpen.
Igen minden igy van és ez nem nem cáfolja az én beirásomat. Legtöbb motorhoz megtalálható a nyomaték görbe mindkét fajta bekötéshez.Az emlitett vezérlő a DM860 simán ellátja a párhuzamos bekötést.A hiányzó infó inkább hogy az adott helyzetben nagy tömegű gép lassú előtolás vagy gyors mozgás szükséges..és ugye itt a az áttételezésről sem tudunk.. Mivel a két bekötés és az áram pár perc alatt változtatható,nyugodtan lehet próbálgatni.kellő odafigyeléssel a nagyobb áramra állitott vezérlő tesztelhető..ha melegszik még nem gond..tüzforró ne legyen..
Párhuzamos bipolárisan kötöttem be 8 kivezetéses. A gépem kb 600kg gép és a sebesség növelésével X tengelyem 3500 -as előtolás felet kezd lépést veszteni míg a többi tengely stabil ennél a sebességnél, egy dippel nagyobb áram nem tudom hogy mennyire terheli a motort? 2,8A helyett 3.5A kicsit soknak érződik bár a motorok tartós nyüstölésnél kb 40-45 fokig melegszenek
Ti fa relief marássnál milyen sebességekkel dolgoztok esetleg van valami szakmai fogásotok a megmunkálási idő csökkentéséhez?
Már már többször olvastam itt a fórumon ilyeneket, de most csak szóvá teszem.
A biboláris párhuzamos és a bipoláris soros bekötésnek ugyan azt a tartónyomatékot kell tudnia.
A bipoláris párhuzamos valóban nagyobb sebességre lehet képes, de a két bekötés közüli választás inkább meghajtó függő. Van-e elég tápfeszültség a bipoláros soros meghajtáshoz, vagy nagyobb motoroknál tud-e a meghajtó elég áramot biztosítani a bipoláris párhuzamos kapcsoláshoz.
Ha 8 kivezetéses a motorod,te döntöd el hogy a bipolás soros vagy párhuzamos bekötésű legyen..egyik kisebb nyomaték de nagyobb fordulat,másik erősebb de nem szereti a nagy fordulatot.Párhuzamos bekötés szerencsésebb.Indulj alulról..2.8A-t ir..ha nem melegszik a motor és szükséged van rá egy dippel emelhetsz rajta..
Sziasztok! Szeretném tapasztalt fórtársak véleményét kikérni, van egy 34HST9805-37B2 tipusú léptető motorom 60v táppal bipoláris bekötéssel DM860A meghajtóval jelenleg 2.8A curent áram erősséggel,
Mennyi a max áram erősség amit adhatok ennek a motornak illetve befolyásolja e a mikroléptetés nagysága az adható áramerősséget?
Motoros | 5101
2017-08-28 08:10:13
[5289]
Esetleg még az is lehet, hogy a motorjaid nem kis ohmikus ellenállású "modern" hibrid motorok, hanem valami régifajta bontott motorok ahol az ohmmérővel mért tekercsellenállás több Ohm...akár 6..7 Ohm. Ha visszaveszed a vezérlő áramot a legkisebbre és még mindig melegszik akkor az egyik megoldás a motorcsere, mert olyan vezérlő már nem igen létezik ami ezekhez jó lenne.
A Mach3 nem tudja, mekkora a léptető motorod árama, így ott azt állítani se lehet. Az áramot a léptetőmotor vezérlődön kell beállítani, erre vagy DIP kapcsolók szolgálnak, vagy egy trimmer potméter. Esetedben vedd vissza ezen elemek átállításával az áramot, és akkor már nem fog annyira melegedni.
Jó Reggelt! Nema23h léptetőmotorjaim gyakorlatilag már üresjáratban hamar felmelegednek(kb 20perc). Mi lehet az oka,esetleg a Mach3 szoftverben nincs jól beállítva valami vagy csak fizikai problémája van?