Hozzáértők segítségét kérném. Adva van egy Arduino Uno és két léptető motor. Hogyan lehetne két különböző fordulatszámmal hajtani egy időben a két motort?
Törölt felhasználó
2018-11-20 11:59:46
[1265]
Ha szervó encoder jelét is az arduinonak kell feldolgozni arra kevés lesz valószínű mega2560 is!
Üdv mindenkinek! Arduino-t szeretnék ötvözni dc szervomotorokkal egy kis műszerész eszterga működtetésére (cnc-sítésére). Létezik-e hasonló lehetőség mint például 3D-s nyomtatóknál jól bevált LCD+controller+arduino+ramps. Ha igen van-e valami nyílt forráskód mint pl a Marlin vagy Repetier firmware a nyomtatókhoz?
valami igyesmit akarok: https://www.youtube.com/watch?v=roUAJfycQ14
hori791130 | 293
2018-11-02 15:15:24
[1256]
Sziasztok,lehet nem jó helyre írok de hátha van itt olyan aki segíteni tudna,van egy nema34 13Nm léptetömotrom és főorsót akarok vele hajtani,be kötésben tudna segíteni valaki?Mach3
sergei01 | 109
2018-10-29 11:53:24
[1255]
Kiindulási alapnak szerintem tökéletes. leírásban benne van minden.
Jó lenne tudni mekkora áramra vannak állítva a motorok vezérlői, a 3.5W ~300mA kér a 12V tól Tápegységet maxra nem hajtunk ki... minél vastagabb az odavezető vezeték annál kisebb a rézveszteség, tehát 1-es vezeték már jó kell hogy legyen de ha elfér gyűrj a kötegbe 2.5 keresztmetszetűt, persze valami hajlékonyat mert hamar el fog törni...
egyébként meg a motorok hajtásánál is a vezérlők minden bizonnyal 24V ot is elviselnek, azzal szebben és gyorsabban mehetnek a motorok...
Sziasztok! Látom itt megy az Amperes beszélgetés. Tanácsot kérnék: van egy kis kék lézer gépem papíron 3.5w-os 1x és 2y tengely mozgató nema17 van rajta. Kérdés hogy elég e a 4-5Ampetes 12v táp. Ha maxon kergetem a lézert akkor a kis venti fordulata halhatóan leesik. Van egy pár pc tápom 3-400w abból tudok neki elég áramot adni? Még egy kérdés milyen kereszmetszetű kábel lenne ideális a lézerhez. Arduino nano vezérli az egészet.
Devecz Miklós | 2663
2018-10-22 15:02:39
[1250]
Köszi. Azt hiszem találtam egy jó kapcsolást, arduinora. A Mach3 nem jó, mert ahhoz le kellene mennem a garázsba, a tekercselést, meg a lakásban akarom megvalósítani.
A motornak igen, de ilyenkor az emelt feszültségű tápegységből kevesebb áramot vesz fel a vezérlő.
Hasonlóan működik mint egy kapcsolóüzemű step/down táp.
A motorok áramát a PWM és step freki miatt egyébként is nehéz mérni, de ha az árammérőt a tápegység és a vezérlő közé kötöd akkor látványos lesz az eredmény.
Ekkor jól látszik az is ahogy növekszik a teljesítmény igény a fordulatszám emelkedésével.
"Nem 12V-on kérik a 2A-t a motorok, hanem csak néhány Volton. Máris más a teljesítmény igény."
Szerintem ez sántít...
Bár nem Arduino és nem 12V, de a méréseim szerint ha egyszerűen akarja valaki kiszámolni akkor teljesen mindegy hogy 12V vagy 43V-al hajtod a motorokat, egy 2A-es motornak 2A-re van szüksége optimálisan menni.
Még a 3D printeremet nem mértem, majd ha lesz időm akkor megmérem, de a CNC-met mértem és az úgy néz ki egyezik a teoretikus számítás szerint is.
Átjöttem ide, mert az a topik, ahová először beírtam, most egy magasztosabb témát taglal, nem akarok ott zavarni.
Akarok építeni egy tekercselő gépet. Nem kell sokat tudnia, csak csévetestet szeretnék tekercselni. Ami az elvárás, két léptető motor lenne benne, az egyik tekercsel, a másik a sorokat rendezné. A vezérlés arduino lenne, aminek lenne egy menetszám kijelzője is, be lehetne állítani a huzalvastagságot, tekercs magasságot, irányváltást.
Most jön a neheze, nincs valakinek egy működő kapcsolása, vezérléssel?
PallMallMan | 447
2018-10-19 21:33:32
[1245]
12 volt 6A laptop táp és semmi se melegszik! Valami nincs jól beállítva!
Nem hogy melegednek hanem forrósodnak. szerintem is kevés neki a táp. 16 microstep van beállítva erre emlékszem. a potit tekergettem akkor megmozdultak de nagyon ergya volt a mozgás. 3 darab nema17 kínai termék. 1,33A 12-24V dc. mint írtam mivel már van 3d nyomtatóm így nem szeretnék építeni belőle semmit. csak megint a kezembe akad pakolás közben. meg időm se van rá nagyon. ennek ellenére köszönöm az információkat.
Az nem baj hogy melegednek, elég sok meleget bírnak. Ha viszont megakadnak néha az sok mindentől függhet. Egyik probléma az hogy szerintem 12V 5A az kevés. A másik az is lehet hogy nagyon magas microstep van beállítva, ha 16 van akkor csökkenteni kell 8-ra, mert akkor a motorok erősebben működnek. Az is lehet hogy a driver nincs jól beállítva, a potin kell az áramot beállítani, a referensfeszültségen keresztül. De ha növeled az áramot akkor még melegebb lesz, ami nem probléma ha rendesen van beállítva, pláne ha egy kis ventilátorral is segítesz hozzá a hűtéshez.
Az attól függ milyenek a motorok és hány motort akarsz hajtani Az UNO CNC shield 4 motort tud hajtani, ha a motorjaid 2A-es akkor 8A az a minimum, de arra 1/3-al ajánlatos növelni, úgyhogy 10A alatt szerintem nem jó. De ha 3D printert akarsz vele használni, vagy pedig maró motort is az hajtja akkor még több kell.
Na meg a másik az hogy ha magasabb feszültséget kötsz a CNC Shildre akkor gyorsabban tudod a motorokat hajtani. 12V az nagyon kevés szerintem, bár működik azzal is, de én egyik gépemet 24V-al a másikat 36V-al hajtom hogy a cél sebességet elérjem.
Urak. kérdésem lenne. ha használ itt valaki Arduino uno r3-at cnc shield-el + nema 17-es motorral a4988 vezérlővel. mekkora tápegységet tesz a cnc shieldre?
Tegnap este letöltöttem a Marlin 1.1.9 verziót, vagy ma vagy a hétvégén kipróbálom hogy működik. Előző verzióm 1.1.7 volt, arról mindent átvittem, de az 1.1.9 verziót átalakították és a PID jobban működik szerintük. Kipróbálom, de remélem probléma nem lesz.
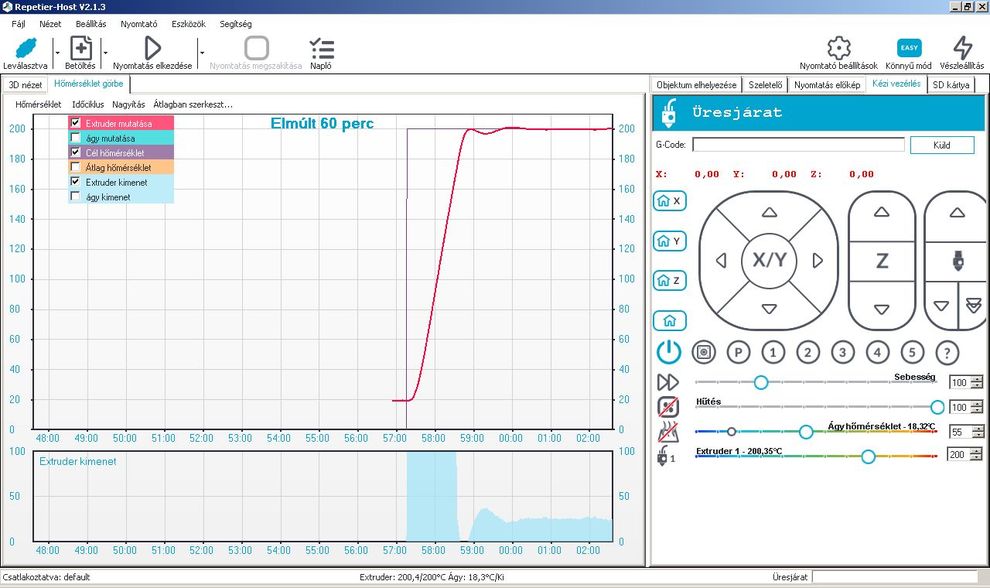
Üdv Elvileg jó a thermisztor mert jól mér és tartja is a hőfokot. Nincs ebben semmi extra hottend sima CTC DIY prusa klón. De hát szerintem természeres jelenség, ha egy tömböt teljes erővel füt 200 fokig túl fog szaladni a 210 en. Most hogy megnöveltem a PID_FUNCTIONAL_RANGE értékét 25 re, jóval hamarabb átveszi a PID a szebályzást és nem szalad túl.
Motion kijelzés megjavult. Rosszul állitottam be az LCD részt 2 lehetőségvolt a NO_LCD és a SLIM_LCD azt hittem valamelyiket választani kell a kettő közül és a slim et választottam. Most hogy mindkettő kommenteztem megjelent az összes menüpont.
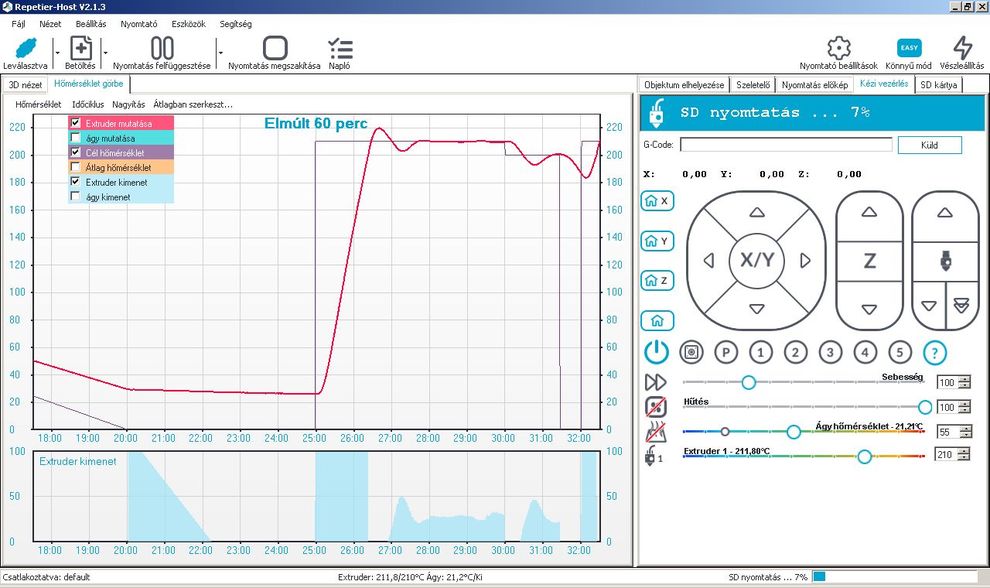
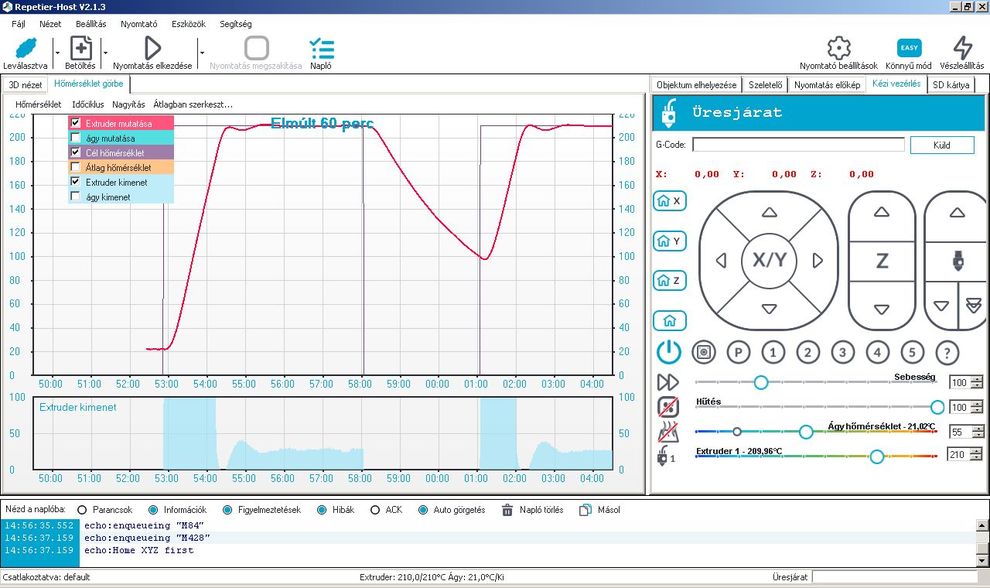
Viszont egy érdekes jelenségre mincs magyarázat. Eredeti GT2560 panelból tettem át ebbe a GT be az A4988 stepper meghajtókat, minden jumper azonos mégis az ESTEP belállitást 95 ről át kellett írnom 230 ra hogy pontos . A többi tengely pontos maradt. It van 2 mentés az első a túlfutásos a második meg a szerintem jó beállitással
Jó thermisztor van beállítva? Vagy ez valami túlméretes hotend vagy fűtőpatron?
A control/motion üres? Mennyire konfiguráltad szét a konfig fájlokat? Ha pl bekapcsolod az automata szintezést, az kivesz onnan néhány lehetőséget, de tejesen üresnek szerintem nem kellene lennie. Egy alap minimál konfiggal is üres?
Újabb megoldásra váró probléma. LCD menüben van egy olyan menüpont hogy MOTION. Na ebbe ha belemegyek tök üres. Az eredeti programnál itt lehetett állítani a tengelyparamétereket, itt meg semmi nincs benne. Tudja valaki hogyan lehet előcsalogatni ezt a menüt, a config.h ban nem találtam ilyen lehetőséget
végyé | 443
2018-10-10 06:11:18
[1226]
Üdv Köszi a tanácsot, futtattam de nem segített. A probléma megoldását a PID_FUNCTIONAL_RANGE 10 nagyobbra állítása jelentette. Amíg ez a határon kívül van teljes teljesítménnyel fűt ezen belül aktív a PID. Eddig azt csinálta, hogy a 210 fokos extruder beállításnál teljes erővel fűtött 200 fokig, akkor kapcsolt ki a fűtés nem csoda hogy túlszaladt 10-15 fokot is. Most hogy átírtam 20 ra így már kikapcsol 190 foknál és onnan veszi át a PID a szabályzást, most a túllendülés 2-3 fok csak.
Üdv Feltettem a marlin 1.1.9 verziót a GT2560 alaplapra több kevesebb sikerrel. Első bajom az volt hogy a szalagkábel csatlakozók a panelon forditva voltak beforrasztva, igy nem kapot tápot az LCD, de ezt megoldottam
Második bajom hogy jelentős kb. 15 fok túllövés van az extrudernél amikor felfűti, ez szerintem túl sok. De utánna már tartja a beállított hőfokot.
van az alaplapon sima mezei soros port? egy ttl átalakítóval csak simán a sorosra dugni az arduino-t
vagy ha megnézed és valami ratyi com port van az alaplapon lehet 5V jön ki belőle nem a szabvány 12 akkor simán rákötve is jó lehet...
az usb-t meg csak tápnak használod? egyébként az alaplapi driver a sajátja nem pedig amit a vin feltett, az fent van? mert az már többször okozott nekem spec problémát...
svejk | 33157
2018-09-19 12:29:35
[1221]
Lefordítottam/beégettem a "lassú" alaplappal újra az Arduinot, semmi változás.
Külső tápfesz is meg volt...
Két különböző gyártmányú alaplap nem lehet ugyanolyan hibás.
És még ezt lehet pontosabbá is tenni szoftveresen is a belső rc modult hőmérséklet kompenzációval DS3231 nél! A ds1307 sajnos a külső rc kavics miat pontatlan!