|
Előzmény: Gacsi, 2019-04-30 23:06:26 [6055]
|
|
Előzmény: Gacsi, 2019-04-30 23:06:26 [6055]
|
|
Előzmény: dtb, 2019-04-30 19:00:47 [6053]
|
|
Előzmény: Egyújabbgépépítő, 2019-04-30 15:52:01 [6050]
|
|
Előzmény: Miki2, 2019-04-30 16:42:46 [6051]
|
|
Előzmény: Egyújabbgépépítő, 2019-04-30 15:52:01 [6050]
|
|
Előzmény: Ati, 2019-04-11 12:11:23 [6038]
|
|
Előzmény: uferi, 2019-04-14 10:11:14 [6047]
|
|
Előzmény: dtb, 2019-04-12 23:52:37 [6046]
|
|
Előzmény: uferi, 2019-04-12 18:55:58 [6044]
|
|
Előzmény: Szalai György, 2019-04-12 15:22:29 [6043]
|
|
Előzmény: uferi, 2019-04-12 14:59:29 [6042]
|
|
Előzmény: dtb, 2019-04-12 12:38:29 [6041]
|
|
Előzmény: uferi, 2019-04-12 12:31:19 [6040]
|
|
Előzmény: dtb, 2019-04-12 11:25:10 [6039]
|
|
Előzmény: Ati, 2019-04-10 21:53:41 [6035]
|
|
Előzmény: morvfer7, 2019-04-10 11:00:06 [6025]
|
|
Előzmény: klaviokft, 2019-04-10 20:41:33 [6034]
|
|
Előzmény: Ati, 2019-04-10 19:33:31 [6033]
|
|
Előzmény: svager, 2019-04-10 17:11:11 [6031]
|
|
Előzmény: eduard, 2019-04-10 16:56:09 [6030]
|
|
Előzmény: Ati, 2019-04-10 14:22:20 [6028]
|
|
Előzmény: Ati, 2019-04-10 14:22:20 [6028]
|
|
Előzmény: dtb, 2019-04-10 12:37:38 [6027]
|
|
Előzmény: Ati, 2019-04-10 12:29:58 [6026]
|
|
Előzmény: dezs, 2019-04-09 22:21:50 [6020]
|
|
Előzmény: Miki2, 2019-04-09 16:31:17 [6018]
|
|
Előzmény: dtb, 2019-04-09 15:12:46 [6017]
|
|
Előzmény: dtb, 2019-04-09 15:03:26 [6015]
|
|
Előzmény: zozo, 2019-04-09 13:41:50 [6014]
|
|
Előzmény: dtb, 2019-04-08 12:04:25 [6011]
|
|
Előzmény: uferi, 2019-04-07 18:56:11 [5994]
|
|
Előzmény: prinx, 2019-04-08 06:40:13 [6004]
|
|
Előzmény: Törölt felhasználó, 2019-04-07 08:39:41 [5980]
|
|
Előzmény: Egyújabbgépépítő, 2019-04-07 16:56:21 [5986]
|
|
▲
◊
|



 )
)
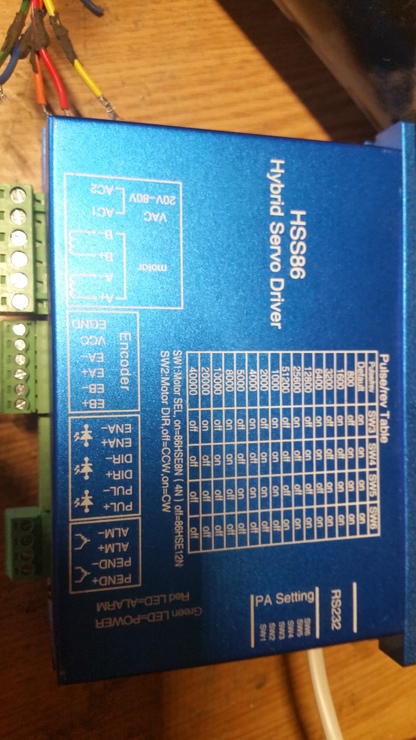
 Pl, egy 2048 ostású encodert biggyesztettem rá egy 6,5Nm-es Sanyo motorra, ezt szeretném forgatni vele,de kéerdés hogy lehet-e állitani az encoder osztást, valahol azt olvasam hogy 1000-2500 között lehet.Egyépként alaplapi rs232- vel próbálkozok.
Pl, egy 2048 ostású encodert biggyesztettem rá egy 6,5Nm-es Sanyo motorra, ezt szeretném forgatni vele,de kéerdés hogy lehet-e állitani az encoder osztást, valahol azt olvasam hogy 1000-2500 között lehet.Egyépként alaplapi rs232- vel próbálkozok.